Широтно-імпульсна модуляція: повний гайд для Arduino-мейкерів
Від мигання світлодіода до польоту дрона — магія імпульсів
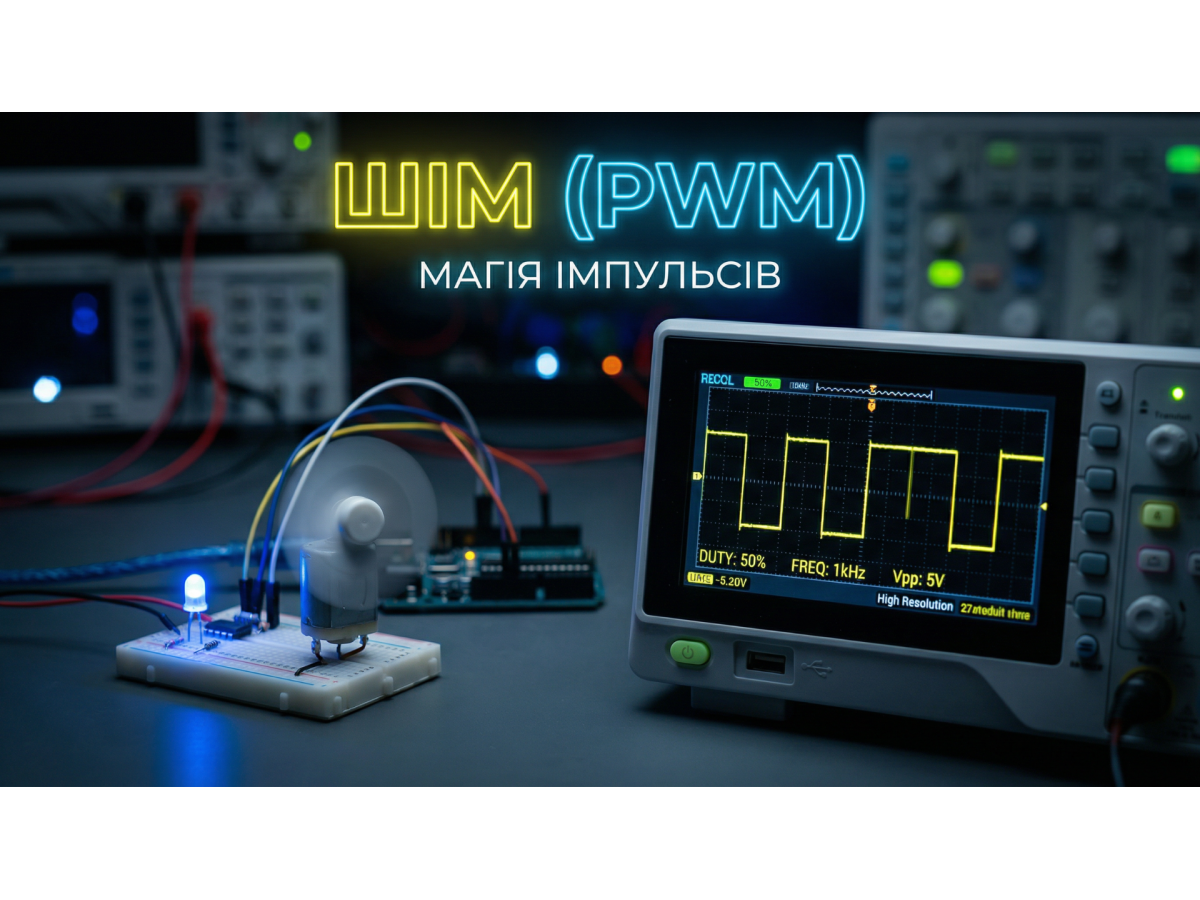
PWM-сигнал на осцилографі — серце сучасної електроніки
Вступ: коли цифровий світ зустрічає аналоговий
Уявіть собі ситуацію: ви тримаєте в руках Arduino, підключаєте світлодіод і хочете зробити його яскравість регульованою — як у настільній лампі. Але є проблема: мікроконтролер «розмовляє» лише двома станами — увімкнено (5 вольт) або вимкнено (0 вольт). Ніяких проміжних значень. Як же тоді отримати, скажімо, 50% яскравості?
Відповідь криється в геніальній техніці під назвою ШІМ (Широтно-Імпульсна Модуляція) або англійською PWM (Pulse Width Modulation). Ця технологія дозволяє "обдурити" фізику та отримати аналогові результати з цифрового сигналу.
Перший комерційний PWM-підсилювач звуку створив британський винахідник Клайв Сінклер у 1964 році. Так, той самий Сінклер, який пізніше подарував світу легендарний комп'ютер ZX Spectrum! Його підсилювач X-10 працював на принципах, які й досі використовуються в сучасних Class-D аудіопідсилювачах.
Що таке ШІМ? Пояснення для людей
Аналогія з краником води
Найпростіша аналогія — це кран з водою, який ви швидко відкриваєте та закриваєте. Якщо тримати кран відкритим весь час — потік максимальний. Якщо закритим — води немає. А тепер уявіть, що ви швидко клацаєте краном: відкрито-закрито-відкрито-закрито... Якщо робити це достатньо швидко, вода буде текти рівномірним потоком, але меншим за максимальний!
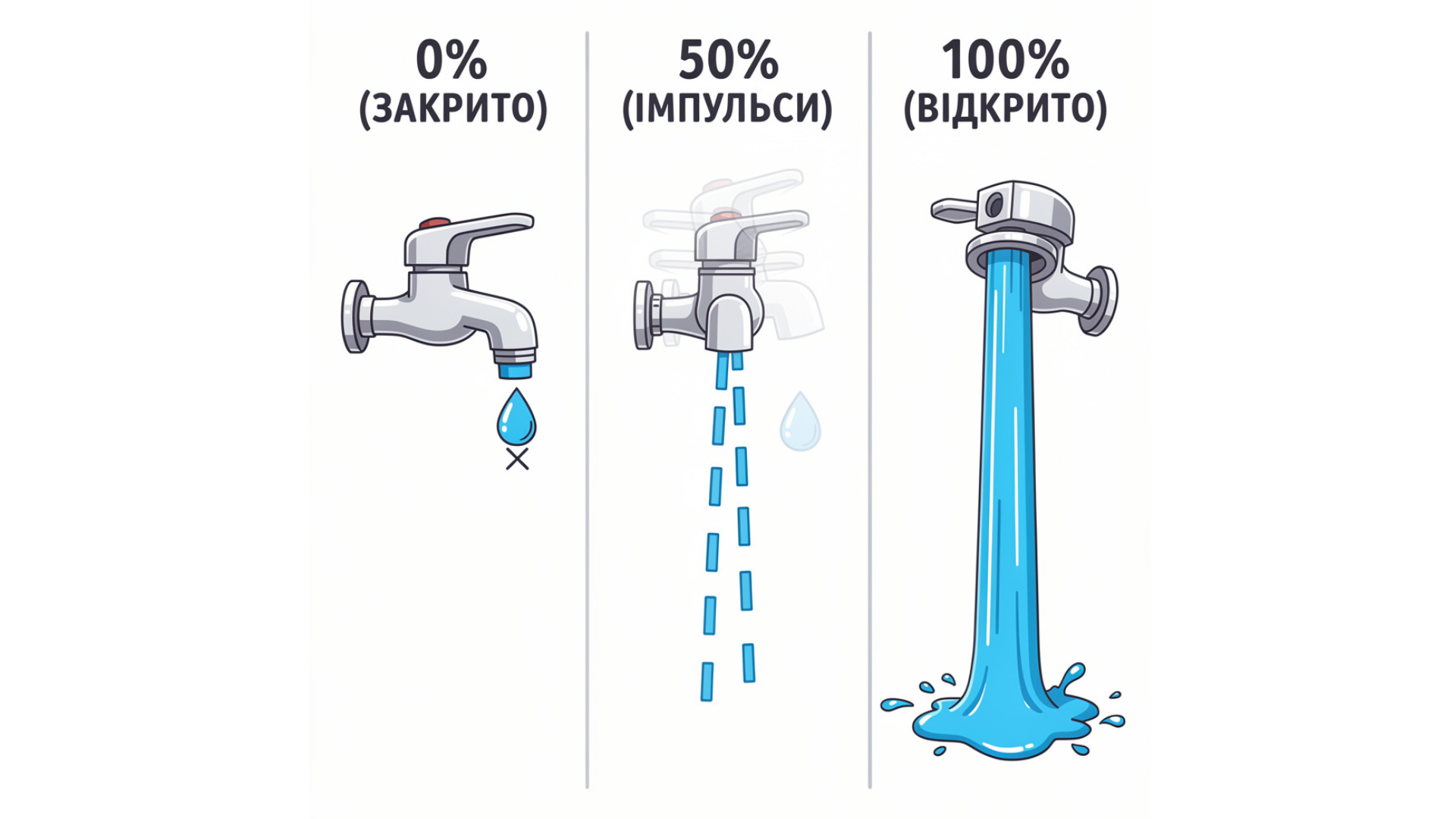
Аналогія PWM з краном води: швидке перемикання створює середній потік
Саме так працює ШІМ. Замість того щоб подавати постійну напругу 2.5 В (що мікроконтролер не вміє), ми подаємо 5 В, але лише половину часу. Результат? Середня напруга становить 2.5 В!
Два ключові параметри
1. Коефіцієнт заповнення (Duty Cycle)
Це відсоток часу, протягом якого сигнал перебуває у стані "увімкнено" (HIGH). Вимірюється у відсотках від 0% до 100%:
- 0% duty cycle — сигнал завжди вимкнений (0 В)
- 50% duty cycle — половину часу увімкнено, половину вимкнено (середня напруга 2.5 В)
- 100% duty cycle — сигнал завжди увімкнений (5 В)

Візуалізація duty cycle: 25%, 50%, 75% — різна ширина імпульсів при однаковому періоді
2. Частота (Frequency)
Це швидкість перемикання між станами HIGH та LOW, вимірюється в герцах (Hz). Частота визначає, скільки повних циклів "увімкнено-вимкнено" відбувається за секунду.
При живленні 5 В та duty cycle 30% середня напруга становитиме 5 × 0.30 = 1.5 В. Саме цю напругу "відчує" підключений пристрій, хоча фактично сигнал стрибає між 0 і 5 вольтами сотні разів на секунду!
Керування яскравістю світлодіодів
Чому око не бачить мерехтіння?
Людське око має обмежену здатність сприймати швидкі зміни світла. Цей поріг називається частотою злиття мерехтіння (Flicker Fusion Frequency) і становить приблизно 60-90 Гц для більшості людей. Якщо світлодіод мигає швидше — ми сприймаємо рівномірне світло.

Сприйняття мерехтіння оком: низька частота (помітне мигання) vs висока частота (рівномірне світло)
Але є нюанс! Навіть якщо ми не бачимо мерехтіння, наш мозок може його відчувати. Дослідження показують, що низькочастотне PWM-мерехтіння може викликати:
- Втому очей та головний біль
- Зниження концентрації при тривалій роботі
- У рідкісних випадках — напади фотосенситивної епілепсії (при частотах 3-70 Гц)
Стандарт IEEE 1789: безпечні частоти
У 2015 році Інститут інженерів електротехніки та електроніки (IEEE) випустив стандарт IEEE 1789-2015 з рекомендаціями щодо безпечних частот PWM для LED-освітлення:
| Частота | Рівень ризику | Рекомендація |
|---|---|---|
| < 90 Гц | ВИСОКИЙ | Уникати |
| 90 – 1250 Гц | СЕРЕДНІЙ | Прийнятно |
| > 1250 Гц | НИЗЬКИЙ | Безпечно |
Arduino Uno за замовчуванням генерує PWM з частотою близько 490 Гц (піни 3, 9, 10, 11) або 980 Гц (піни 5, 6). Це знаходиться в "жовтій зоні" — прийнятно для більшості застосувань, але для професійного освітлення варто піднімати частоту.
Багато OLED-екранів смартфонів використовують PWM для регулювання яскравості з частотою 200-500 Гц. При низькій яскравості деякі користувачі скаржаться на втому очей. Виробники преміум-смартфонів поступово переходять на DC-димінг або високочастотний PWM (понад 1920 Гц).
Практика: плавне затухання LED на Arduino
Ось простий приклад коду для створення ефекту "дихання" світлодіода:
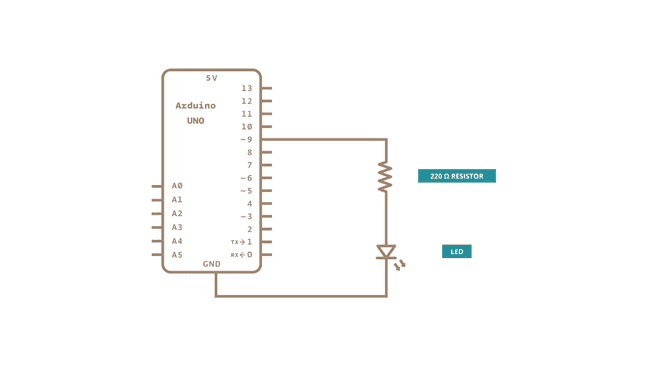
Схема підключення LED до Arduino для PWM-димінгу (пін 9, резистор 220 Ом)
// LED "Дихання" - плавне затухання const int ledPin = 9; // PWM-пін void setup() { pinMode(ledPin, OUTPUT); } void loop() { // Плавне збільшення яскравості for (int brightness = 0; brightness <= 255; brightness++) { analogWrite(ledPin, brightness); delay(10); // 10 мс затримка } // Плавне зменшення яскравості for (int brightness = 255; brightness >= 0; brightness--) { analogWrite(ledPin, brightness); delay(10); } }
Як це працює: Функція analogWrite() приймає значення від 0 до 255, де 0 — це 0% duty cycle, а 255 — це 100%. Arduino автоматично генерує PWM-сигнал відповідної ширини.
Нелінійність сприйняття: гамма-корекція
Людське око сприймає яскравість логарифмічно, а не лінійно. Це означає, що різниця між 10% і 20% яскравості здається більшою, ніж між 80% і 90%. Для досягнення візуально рівномірного затухання потрібна гамма-корекція:
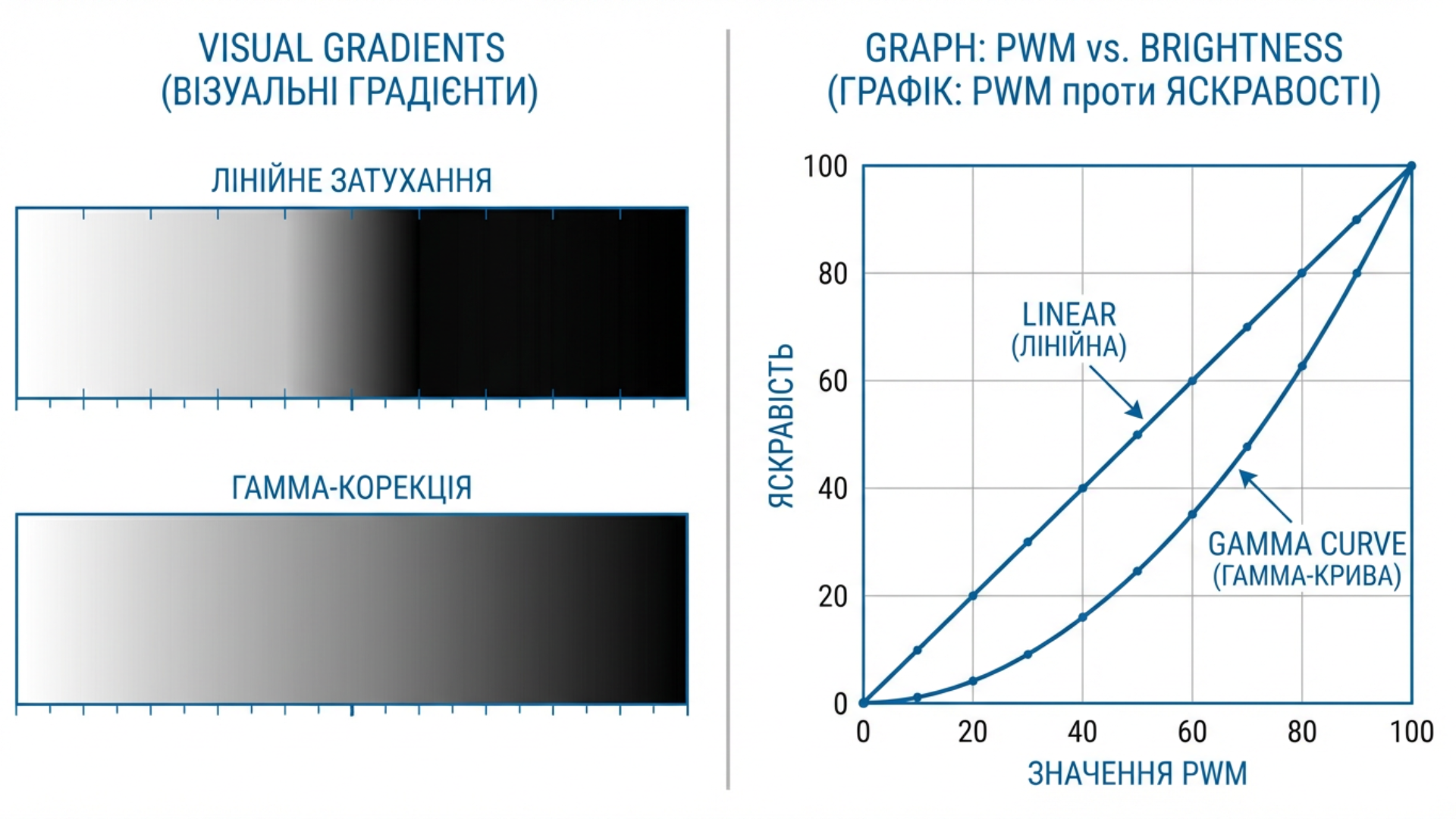
Порівняння: лінійне затухання (сприймається нерівномірно) vs гамма-скориговане (візуально плавне)
// Гамма-корекція для плавного затухання const float gamma_value = 2.2; int gammaCorrect(int linear_value) { float normalized = linear_value / 255.0; float corrected = pow(normalized, gamma_value); return (int)(corrected * 255); } void loop() { for (int i = 0; i <= 255; i++) { analogWrite(ledPin, gammaCorrect(i)); delay(10); } }
Керування швидкістю двигунів
DC-мотори: інерція як природний фільтр
На відміну від світлодіодів, DC-мотори мають механічну інерцію. Ротор не може миттєво зупинитися або розігнатися. Ця властивість перетворює переривчастий PWM-сигнал на плавне обертання — мотор просто "усереднює" імпульси!
При 50% duty cycle мотор отримує половину максимальної потужності та обертається приблизно з половинною швидкістю. Але є важливий нюанс: частота PWM для моторів зазвичай нижча, ніж для LED — від десятків герц до кількох кілогерц.
Якщо PWM-частота потрапляє в діапазон 20 Гц — 20 кГц, мотор може видавати чутний писк або гул. Це вібрації обмоток на частоті PWM. Рішення: або знизити частоту нижче 20 Гц (що погіршить плавність), або підняти вище 20 кГц (що збільшить втрати на перемикання).
H-Bridge: керування напрямком обертання
PWM контролює лише швидкість мотора. Для зміни напрямку обертання потрібно змінити полярність живлення. Тут на допомогу приходить схема під назвою H-Bridge (H-міст).
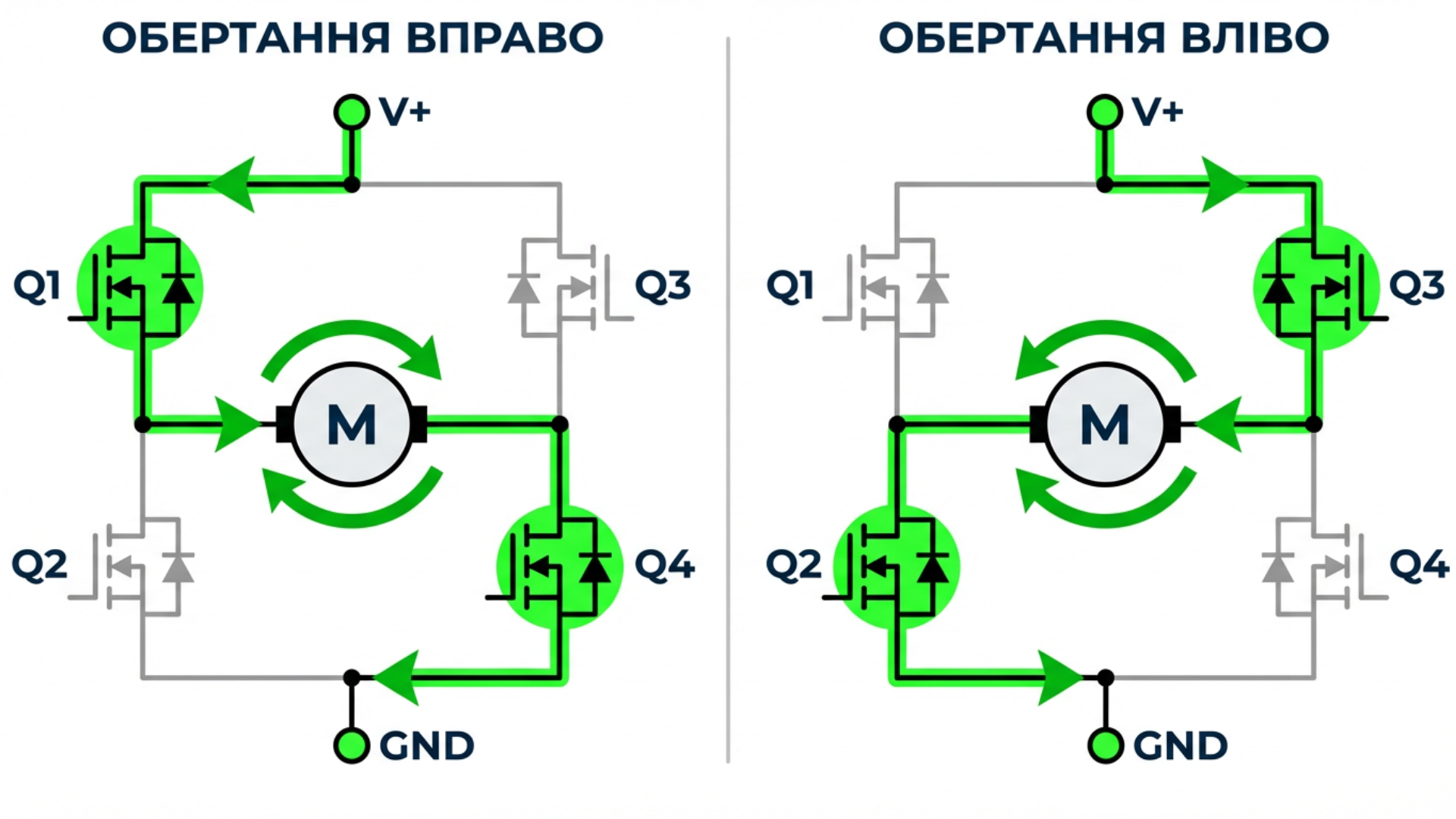
Принцип роботи H-Bridge: різні комбінації перемикачів змінюють напрямок струму через мотор
H-міст складається з чотирьох перемикачів (транзисторів), розташованих у формі літери "H". Мотор знаходиться посередині. Вмикаючи різні пари перемикачів, ми направляємо струм в різних напрямках через мотор.
Популярні H-Bridge драйвери:
- L298N — класика для Arduino, два канали, до 2А на канал
- TB6612FNG — компактніший, ефективніший, до 1.2А
- DRV8833 — популярний вибір для малих роботів
Практика: керування мотором з L298N
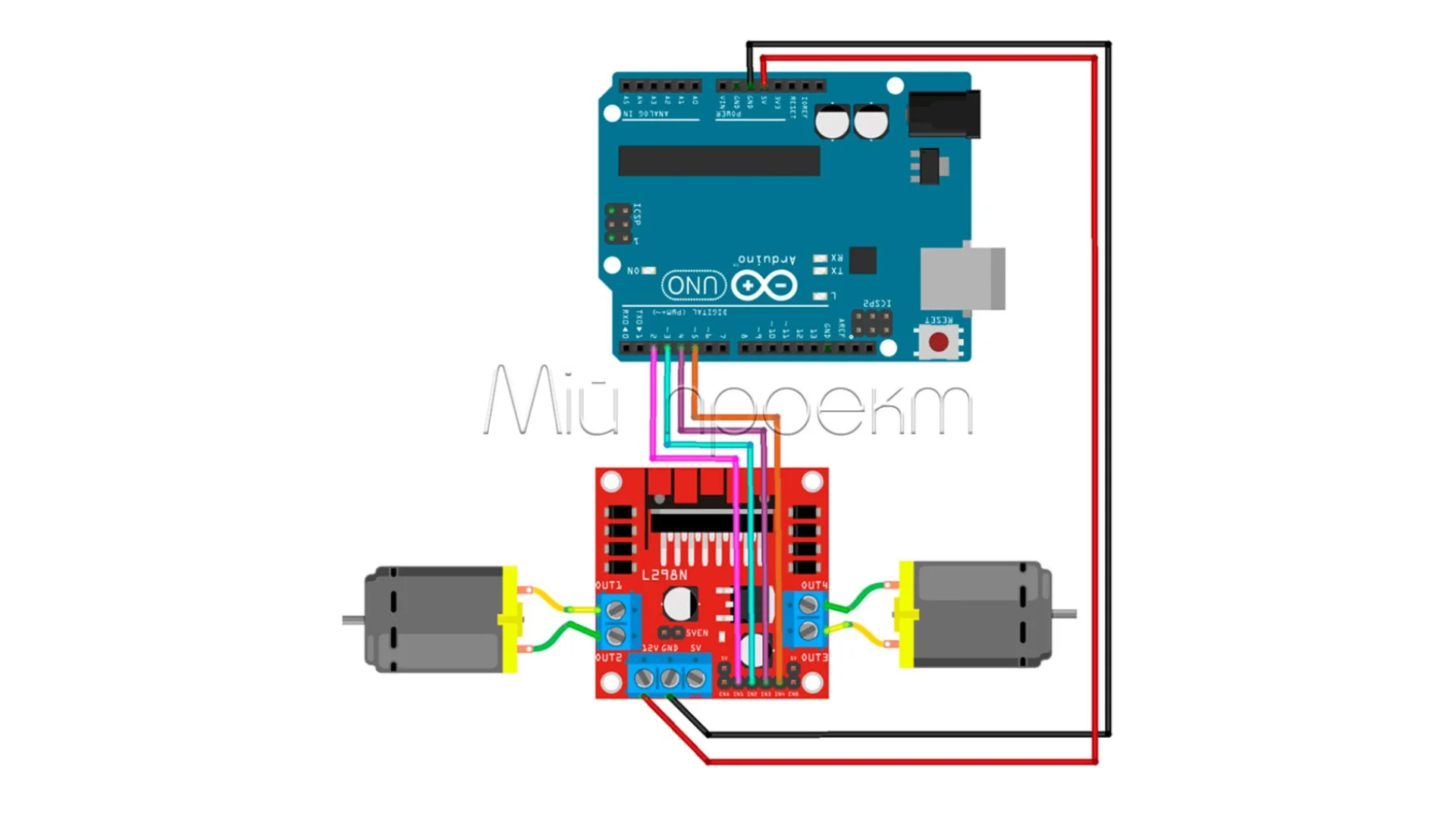
Схема підключення L298N до Arduino: ENA (PWM), IN1/IN2 (напрямок), мотор та живлення
// Керування DC-мотором через L298N const int ENA = 9; // PWM для швидкості const int IN1 = 7; // Напрямок 1 const int IN2 = 6; // Напрямок 2 void setup() { pinMode(ENA, OUTPUT); pinMode(IN1, OUTPUT); pinMode(IN2, OUTPUT); } // Обертання вперед із заданою швидкістю (0-255) void forward(int speed) { digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW); analogWrite(ENA, speed); } // Обертання назад void backward(int speed) { digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH); analogWrite(ENA, speed); } // Зупинка void stopMotor() { digitalWrite(IN1, LOW); digitalWrite(IN2, LOW); analogWrite(ENA, 0); } void loop() { forward(200); // 78% швидкості вперед delay(2000); backward(150); // 59% швидкості назад delay(2000); stopMotor(); delay(1000); }
Dead-time: захист від короткого замикання
При швидкому перемиканні H-моста існує небезпека shoot-through — короткого замикання, коли обидва транзистори одного плеча випадково вмикаються одночасно. Це може спалити схему за мілісекунди!
Dead-time (мертвий час) — коротка пауза між вимкненням одного транзистора та увімкненням іншого. Якісні драйвери моторів мають вбудований dead-time, але при самостійній побудові H-моста це критично важливо врахувати.
Сервоприводи: точне позиціювання
Як працює сервомотор?
Сервопривід — це не просто мотор, а цілий механізм із зворотним зв'язком. Всередині знаходиться DC-мотор, редуктор та потенціометр, який відстежує поточний кут повороту. Вбудована електроніка порівнює бажане положення (задане через PWM) з фактичним і коригує позицію.

Внутрішня будова сервоприводу: мотор, редуктор, потенціометр зворотного зв'язку, керуюча плата
Ключова особливість: на відміну від звичайного PWM, де важливий duty cycle, для сервоприводів критична саме тривалість імпульсу, а не його відсоток від періоду!
Стандартні параметри сигналу
Типовий хобі-сервопривід (SG90, MG996R тощо) очікує сигнал із такими параметрами:
- Частота: 50 Гц (період 20 мс)
- Імпульс 1 мс — положення 0°
- Імпульс 1.5 мс — центральне положення 90°
- Імпульс 2 мс — положення 180°
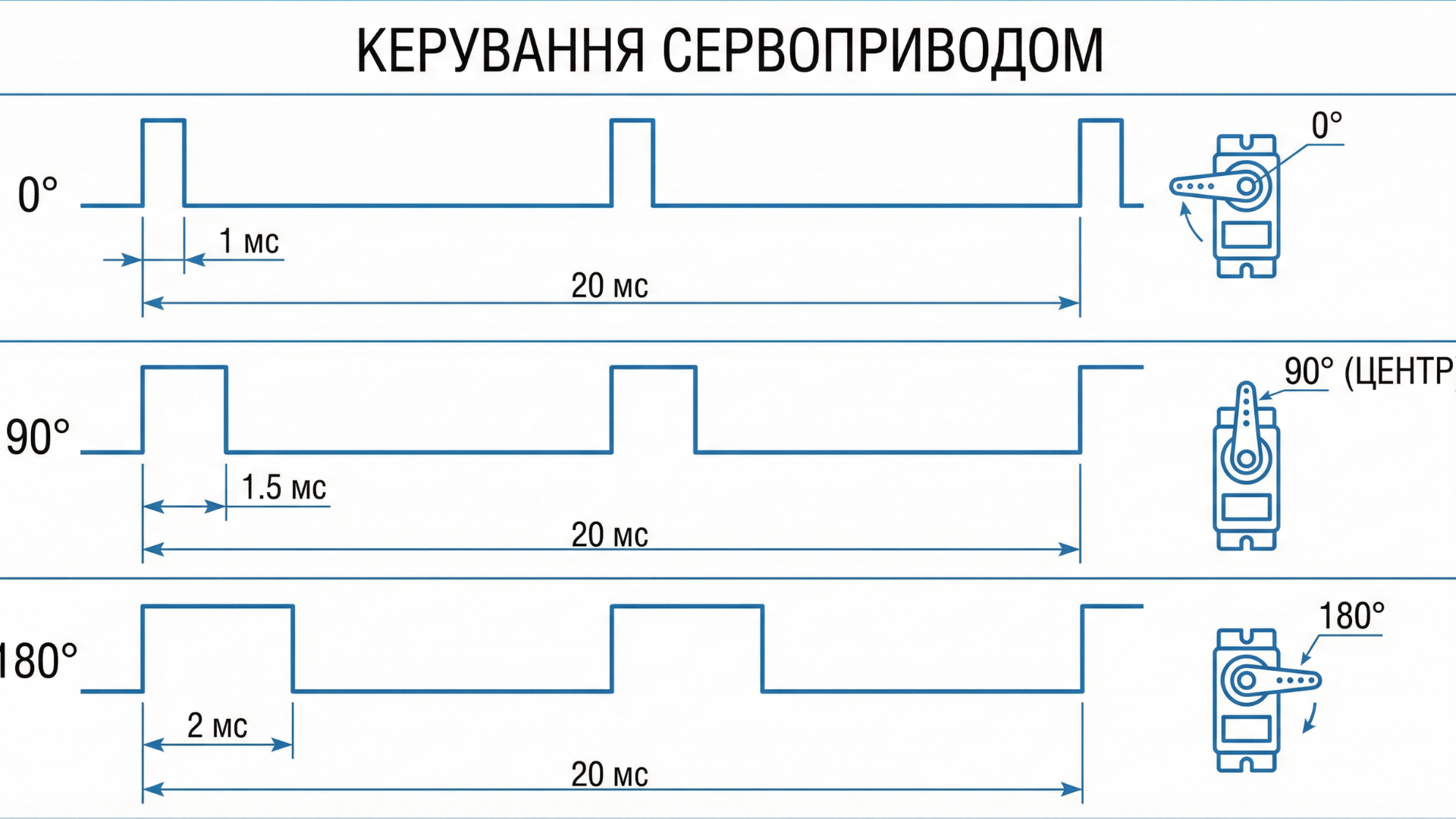
Залежність кута сервоприводу від ширини імпульсу: 1 мс = 0°, 1.5 мс = 90°, 2 мс = 180°
Частота 50 Гц (період 20 мс) для сервоприводів походить із часів радіокерованих моделей 1960-х років. Тоді сигнал передавався через PPM (Pulse Position Modulation), і період ~22.5 мс дозволяв керувати кількома сервоприводами по одному радіоканалу. Стандарт залишився, хоча технології давно змінились!
Практика: керування сервоприводом
Arduino має вбудовану бібліотеку Servo, яка спрощує роботу:
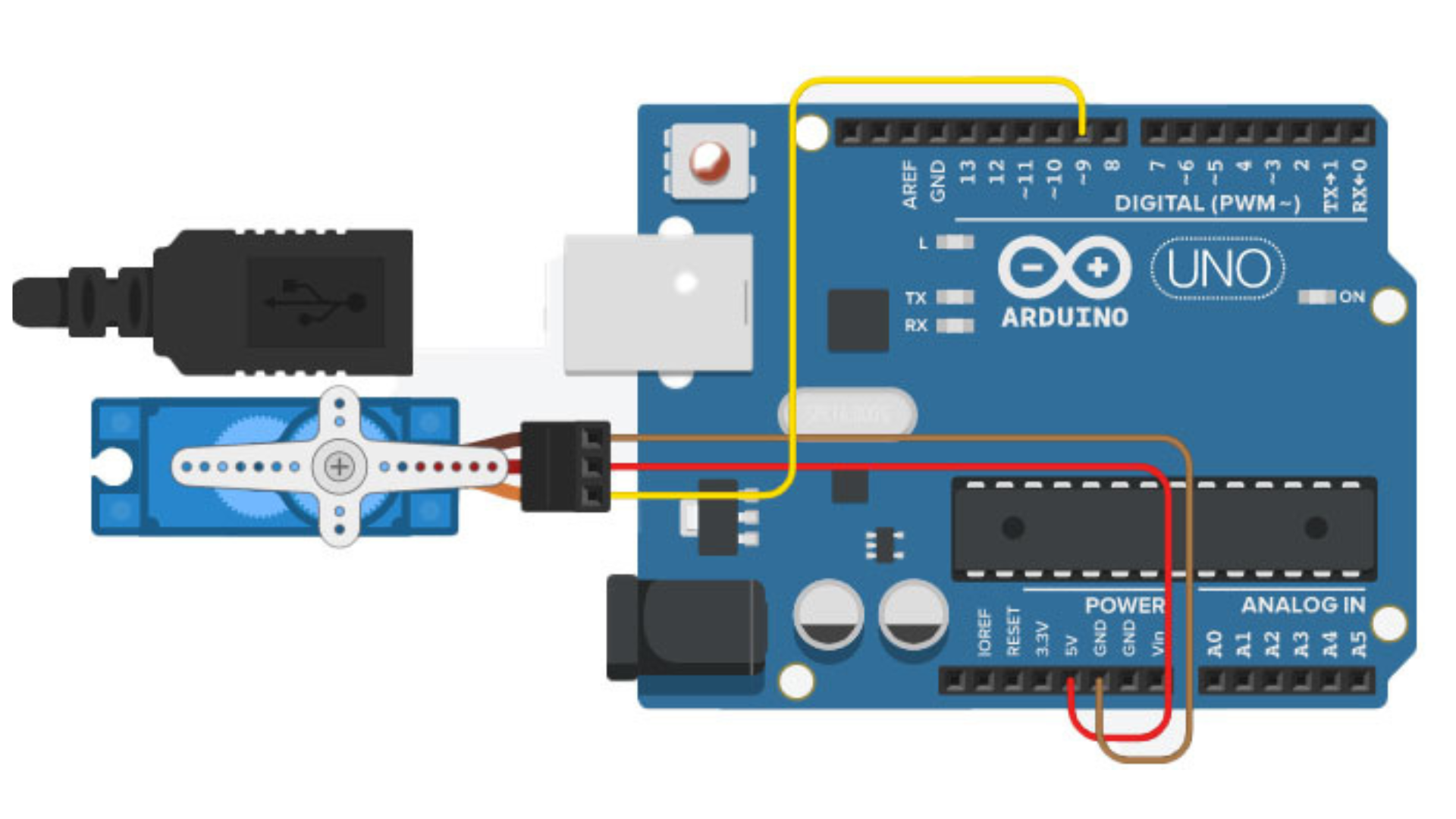
Схема підключення сервоприводу: сигнал (помаранчевий), живлення (червоний), земля (коричневий)
#include <Servo.h> Servo myServo; const int servoPin = 9; void setup() { myServo.attach(servoPin); } void loop() { // Повертаємо на 0° myServo.write(0); delay(1000); // Центральне положення myServo.write(90); delay(1000); // Максимальний кут myServo.write(180); delay(1000); } // Альтернатива: точне керування через мікросекунди // myServo.writeMicroseconds(1500); // Центр
Порада: Дешеві сервоприводи часто мають неточні межі руху. Замість стандартних 1000-2000 мкс вони можуть працювати в діапазоні 500-2400 мкс. Експериментуйте з writeMicroseconds() для точного калібрування.
PWM на Arduino: заглиблення в деталі
Які піни підтримують PWM?
Не всі піни Arduino однакові! PWM доступний лише на пінах, позначених символом "~" на платі. Для Arduino Uno це піни 3, 5, 6, 9, 10, 11.

Розташування PWM-пінів на Arduino Uno — позначені символом "~"
| Піни | Таймер | Частота за замовч. |
|---|---|---|
| 5, 6 | Timer0 | ~980 Гц |
| 9, 10 | Timer1 | ~490 Гц |
| 3, 11 | Timer2 | ~490 Гц |
Як змінити частоту PWM?
За замовчуванням Arduino використовує частоти близько 500 Гц. Але для деяких застосувань (SMPS, безшумне керування моторами) потрібні вищі частоти. Це можна налаштувати через регістри таймерів:
// Зміна частоти PWM на пінах 9 і 10 (Timer1) // УВАГА: це впливає на функцію delay() та millis()! void setup() { // Встановлюємо дільник = 1 для частоти ~31 кГц TCCR1B = TCCR1B & B11111000 | B00000001; // Дільник = 8 для частоти ~3.9 кГц // TCCR1B = TCCR1B & B11111000 | B00000010; // Дільник = 64 для частоти ~490 Гц (за замовчуванням) // TCCR1B = TCCR1B & B11111000 | B00000011; pinMode(9, OUTPUT); } void loop() { analogWrite(9, 128); // 50% duty cycle }
Зміна налаштувань Timer0 (піни 5, 6) порушить роботу функцій delay(), millis() та micros(). Уникайте модифікації Timer0, якщо це можливо.
ESP32: більше можливостей
ESP32 має значно гнучкішу систему PWM. Замість фіксованих таймерів, тут є 16 незалежних PWM-каналів із програмованою частотою від 1 Гц до 40 МГц та роздільною здатністю до 16 біт!

ESP32 DevKit — всі GPIO-піни підтримують PWM з гнучким налаштуванням частоти
// PWM на ESP32 const int ledPin = 2; const int pwmChannel = 0; const int frequency = 5000; // 5 кГц const int resolution = 8; // 8 біт (0-255) void setup() { ledcSetup(pwmChannel, frequency, resolution); ledcAttachPin(ledPin, pwmChannel); } void loop() { // Плавне затухання for (int duty = 0; duty <= 255; duty++) { ledcWrite(pwmChannel, duty); delay(10); } }
Застосування PWM у реальному світі
PWM оточує нас повсюди, навіть якщо ми цього не помічаємо:

PWM у повсякденному житті: освітлення, транспорт, аудіо, побутова техніка
- LED-освітлення — від настільних ламп до автомобільних фар
- Екрани смартфонів та моніторів — регулювання яскравості підсвітки
- Електротранспорт — контролери моторів у Tesla, електросамокатах, дронах
- Class-D аудіопідсилювачі — компактні та ефективні (до 95% ККД!)
- Імпульсні блоки живлення — у кожному комп'ютері та зарядному пристрої
- Сонячні інвертори — перетворення DC у AC для мережі
- Терморегулятори — керування елементами Пельтьє
- Вентилятори ПК — 4-pin PWM для безшумного охолодження
Марсохід Perseverance використовує PWM-контролери для керування своїми моторами та сервоприводами. У розрідженій атмосфері Марса ефективне керування потужністю критично важливе — кожен ват на рахунку!
Ідеї для проєктів
Ось кілька ідей для практики роботи з PWM:
🟢 Початковий рівень
Змішування кольорів через три PWM-канали. Створіть веселку або кольоромузику!
Яскравість LED реагує на звук через мікрофон — простий аудіовізуалізатор.
Класичний регулятор яскравості — перший крок до розуміння PWM.
🟡 Середній рівень
Два DC-мотори через H-Bridge, керування зі смартфона по Bluetooth.
Два сервоприводи для повороту камери по горизонталі та вертикалі.
Швидкість залежить від температури — розумне охолодження.
🔴 Просунутий рівень
Синхронне PWM-керування чотирма безколекторними моторами через ESC.
Оптимізація заряду акумулятора через відстеження точки максимальної потужності.
Власний аудіопідсилювач із ШІМ — вершина майстерності!
Висновки
PWM — це той рідкісний випадок, коли проста ідея має величезний вплив. Швидке перемикання між двома станами дозволяє цифровим пристроям керувати аналоговим світом: від яскравості одного світлодіода до руху електромобіля.
Ключові моменти, які варто запам'ятати:
- Duty cycle визначає середню потужність (0-100%)
- Частота має бути достатньо високою (>1 кГц для LED, >20 кГц для безшумних моторів)
- Сервоприводи працюють на 50 Гц і залежать від ширини імпульсу (1-2 мс)
- analogWrite() на Arduino — найпростіший спосіб почати

Від простого до складного: PWM — фундамент сучасної електроніки
Тепер, коли ви розумієте принципи PWM, весь світ мікроконтролерів відкривається перед вами. Від простого мигання LED до створення власного дрона — все це побудовано на тих самих фундаментальних принципах, які ви щойно вивчили.
Успіхів у ваших проєктах! 🚀
Корисні посилання
© 2025 Мій Проект.Автор: Jazzzman. Використання матеріалів дозволено лише з посиланням на джерело.

 3А")









Написати коментар