Широтно-импульсная модуляция: полный гайд для Arduino-мейкеров
От мигания светодиода до полета дрона — магия импульсов
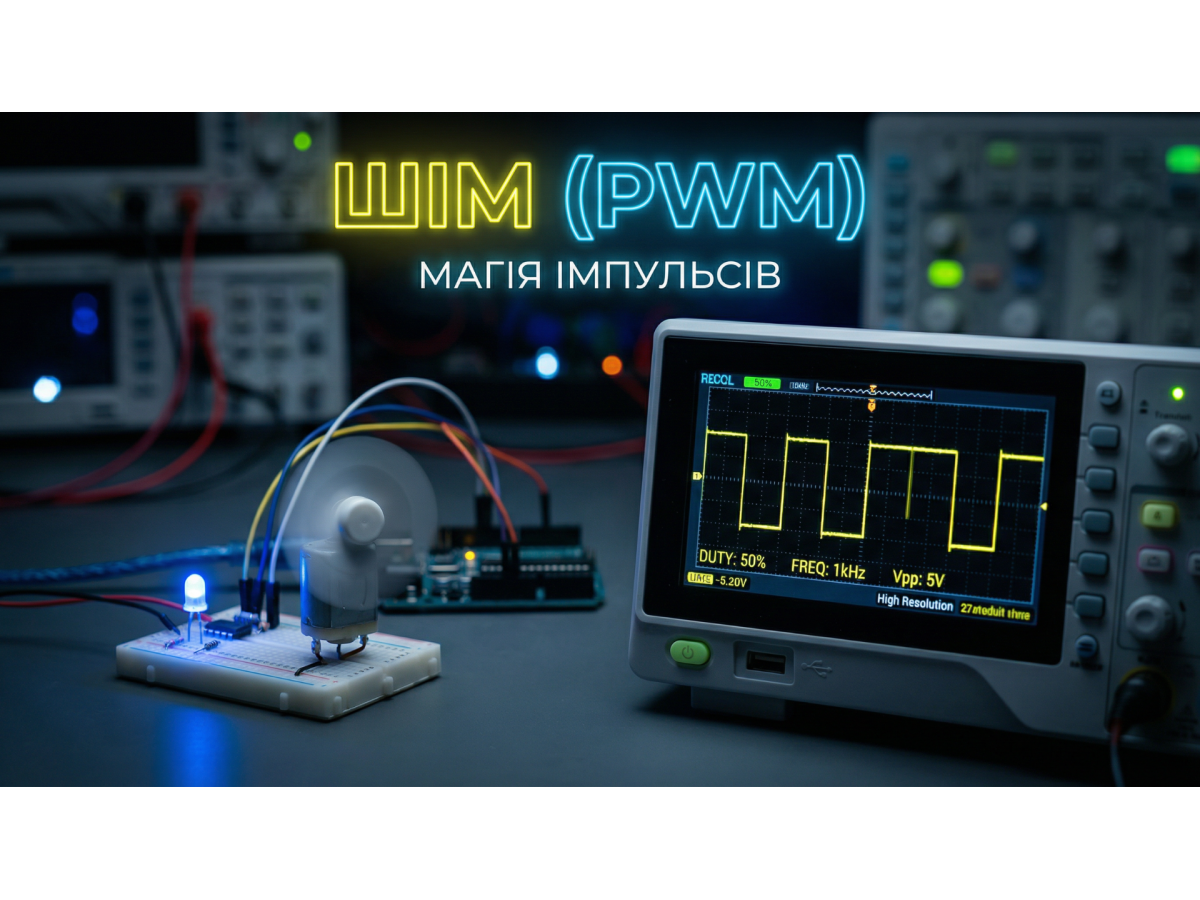
PWM-сигнал на осциллографе — сердце современной электроники
Введение: когда цифровой мир встречает аналоговый
Представьте себе ситуацию: вы держите в руках Arduino, подключаете светодиод и хотите сделать его яркость регулируемой — как в настольной лампе. Но есть проблема: микроконтроллер «разговаривает» только двумя состояниями — включено (5 вольт) или выключено (0 вольт). Никаких промежуточных значений. Как же тогда получить, скажем, 50% яркости?
Ответ кроется в гениальной технике под названием ШИМ (Широтно-Импульсная Модуляция) или на английском PWM (Pulse Width Modulation). Эта технология позволяет "обмануть" физику и получить аналоговые результаты из цифрового сигнала.
Первый коммерческий PWM-усилитель звука создал британский изобретатель Клайв Синклер в 1964 году. Да, тот самый Синклер, который позже подарил миру легендарный компьютер ZX Spectrum! Его усилитель X-10 работал на принципах, которые до сих пор используются в современных Class-D аудиоусилителях.
Что такое ШИМ? Объяснение для людей
Аналогия с краником воды
Самая простая аналогия — это кран с водой, который вы быстро открываете и закрываете. Если держать кран открытым все время — поток максимальный. Если закрытым — воды нет. А теперь представьте, что вы быстро щелкаете краном: открыто-закрыто-открыто-закрыто... Если делать это достаточно быстро, вода будет течь равномерным потоком, но меньшим, чем максимальный!
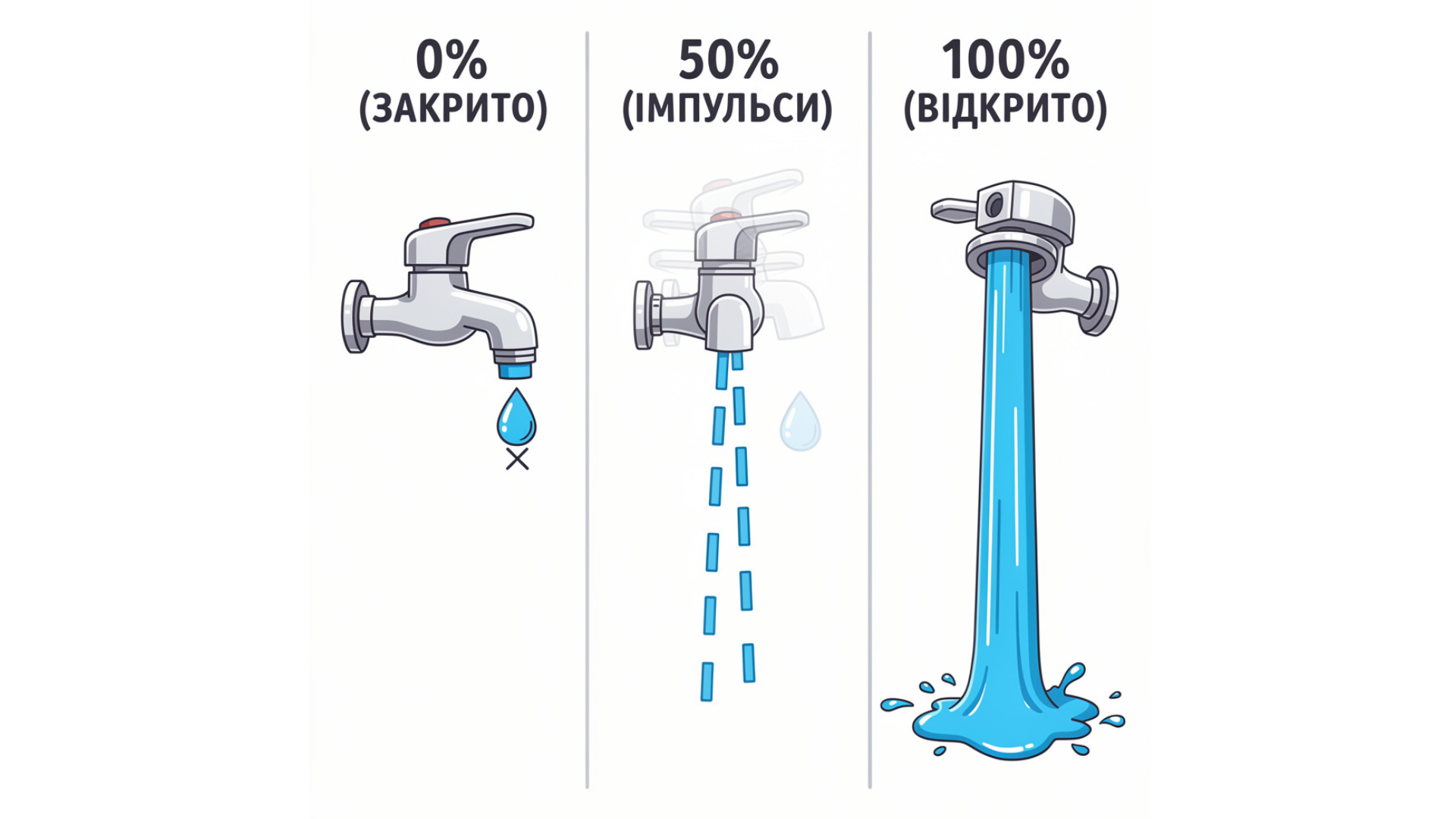
Аналогия PWM с краном воды: быстрое переключение создает средний поток
Именно так работает ШИМ. Вместо того чтобы подавать постоянное напряжение 2.5 В (что микроконтроллер не умеет), мы подаем 5 В, но только половину времени. Результат? Среднее напряжение составляет 2.5 В!
Два ключевых параметра
1. Коэффициент заполнения (Duty Cycle)
Это процент времени, в течение которого сигнал находится в состоянии "включено" (HIGH). Измеряется в процентах от 0% до 100%:
- 0% duty cycle — сигнал всегда выключен (0 В)
- 50% duty cycle — половину времени включен, половину выключен (среднее напряжение 2.5 В)
- 100% duty cycle — сигнал всегда включен (5 В)

Визуализация duty cycle: 25%, 50%, 75% — разная ширина импульсов при одинаковом периоде
2. Частота (Frequency)
Это скорость переключения между состояниями HIGH и LOW, измеряется в герцах (Hz). Частота определяет, сколько полных циклов "включено-выключено" происходит за секунду.
При питании 5 В и duty cycle 30% среднее напряжение составит 5 × 0.30 = 1.5 В. Именно это напряжение "почувствует" подключенное устройство, хотя фактически сигнал скачет между 0 и 5 вольтами сотни раз в секунду!
Управление яркостью светодиодов
Почему глаз не видит мерцания?
Человеческий глаз имеет ограниченную способность воспринимать быстрые изменения света. Этот порог называется частотой слияния мерцания (Flicker Fusion Frequency) и составляет примерно 60-90 Гц для большинства людей. Если светодиод мигает быстрее — мы воспринимаем равномерный свет.

Восприятие мерцания глазом: низкая частота (заметное мигание) vs высокая частота (равномерный свет)
Но есть нюанс! Даже если мы не видим мерцания, наш мозг может его чувствовать. Исследования показывают, что низкочастотное PWM-мерцание может вызвать:
- Усталость глаз и головную боль
- Снижение концентрации при длительной работе
- В редких случаях — приступы фотосенситивной эпилепсии (при частотах 3-70 Гц)
Стандарт IEEE 1789: безопасные частоты
В 2015 году Институт инженеров электротехники и электроники (IEEE) выпустил стандарт IEEE 1789-2015 с рекомендациями по безопасным частотам PWM для LED-освещения:
| Частота | Уровень риска | Рекомендация |
|---|---|---|
| < 90 Гц | ВЫСОКИЙ | Избегать |
| 90 – 1250 Гц | СРЕДНИЙ | Приемлемо |
| > 1250 Гц | НИЗКИЙ | Безопасно |
Arduino Uno по умолчанию генерирует PWM с частотой около 490 Гц (пины 3, 9, 10, 11) или 980 Гц (пины 5, 6). Это находится в "желтой зоне" — приемлемо для большинства применений, но для профессионального освещения стоит поднимать частоту.
Многие OLED-экраны смартфонов используют PWM для регулировки яркости с частотой 200-500 Гц. При низкой яркости некоторые пользователи жалуются на усталость глаз. Производители премиум-смартфонов постепенно переходят на DC-димминг или высокочастотный PWM (более 1920 Гц).
Практика: плавное затухание LED на Arduino
Вот простой пример кода для создания эффекта "дыхания" светодиода:
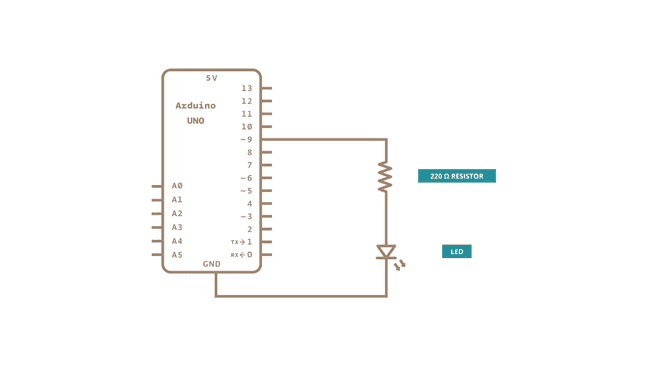
Схема подключения LED к Arduino для PWM-диммирования (пин 9, резистор 220 Ом)
// LED "Дыхание" - плавное затухание const int ledPin = 9; // PWM-пин void setup() { pinMode(ledPin, OUTPUT); } void loop() { // Плавное увеличение яркости for (int brightness = 0; brightness <= 255; brightness++) { analogWrite(ledPin, brightness); delay(10); // 10 мс задержка } // Плавное уменьшение яркости for (int brightness = 255; brightness >= 0; brightness--) { analogWrite(ledPin, brightness); delay(10); } }
Как это работает: Функция analogWrite() принимает значение от 0 до 255, где 0 — это 0% duty cycle, а 255 — это 100%. Arduino автоматически генерирует PWM-сигнал соответствующей ширины.
Нелинейность восприятия: гамма-коррекция
Человеческий глаз воспринимает яркость логарифмически, а не линейно. Это означает, что разница между 10% и 20% яркости кажется большей, чем между 80% и 90%. Для достижения визуально равномерного затухания нужна гамма-коррекция:
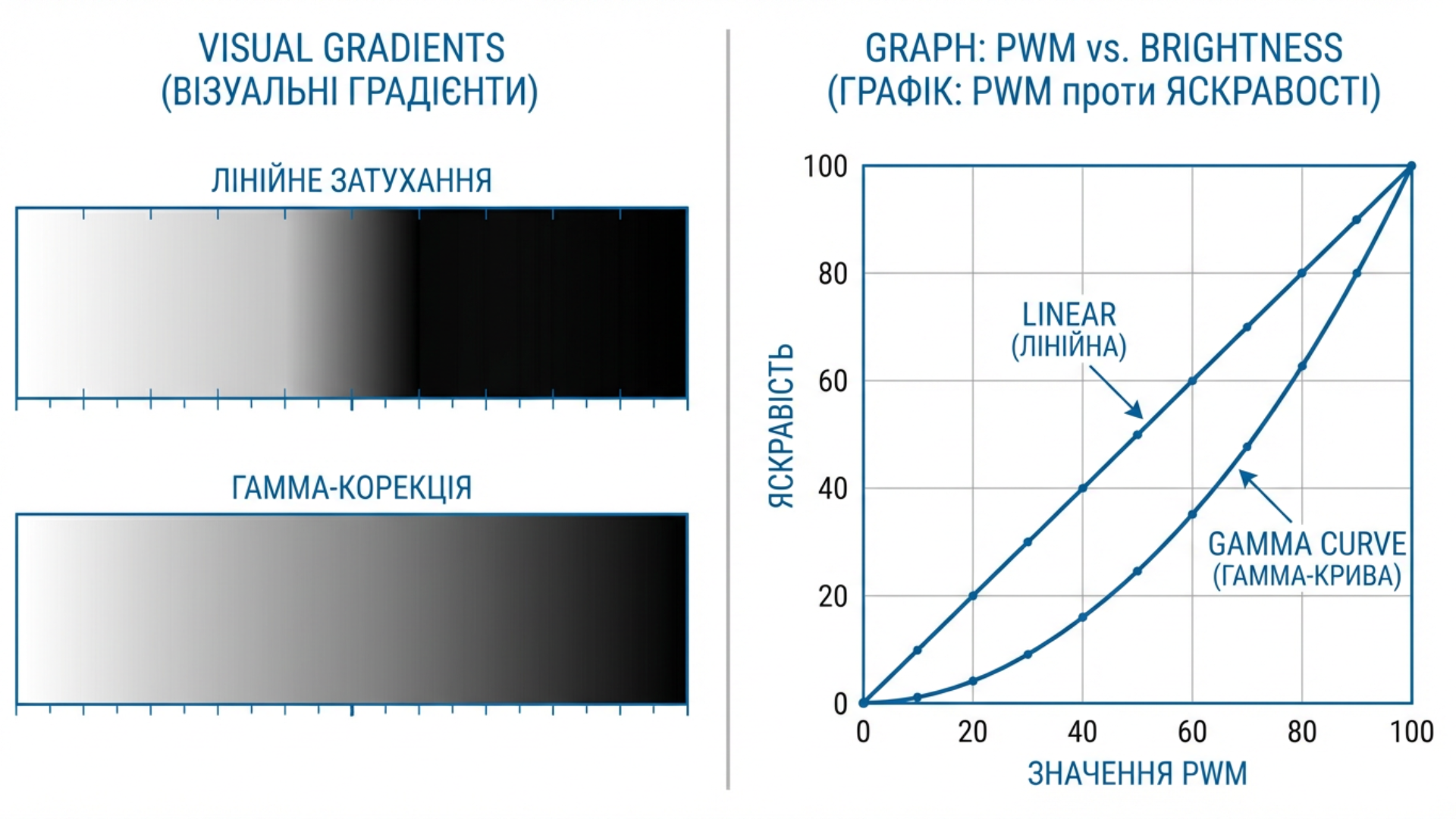
Сравнение: линейное затухание (воспринимается неравномерно) vs гамма-скорректированное (визуально плавное)
// Гамма-коррекция для плавного затухания const float gamma_value = 2.2; int gammaCorrect(int linear_value) { float normalized = linear_value / 255.0; float corrected = pow(normalized, gamma_value); return (int)(corrected * 255); } void loop() { for (int i = 0; i <= 255; i++) { analogWrite(ledPin, gammaCorrect(i)); delay(10); } }
Управление скоростью двигателей
DC-моторы: инерция как природный фильтр
В отличие от светодиодов, DC-моторы обладают механической инерцией. Ротор не может мгновенно остановиться или разогнаться. Это свойство превращает прерывистый PWM-сигнал в плавное вращение — мотор просто "усредняет" импульсы!
При 50% duty cycle мотор получает половину максимальной мощности и вращается примерно с половинной скоростью. Но есть важный нюанс: частота PWM для моторов обычно ниже, чем для LED — от десятков герц до нескольких килогерц.
Если PWM-частота попадает в диапазон 20 Гц – 20 кГц, мотор может издавать слышимый писк или гул. Это вибрации обмоток на частоте PWM. Решение: либо снизить частоту ниже 20 Гц (что ухудшит плавность), либо поднять выше 20 кГц (что увеличит потери на переключение).
H-Bridge: управление направлением вращения
PWM контролирует только скорость мотора. Для изменения направления вращения необходимо изменить полярность питания. Здесь на помощь приходит схема под названием H-Bridge (Н-мост).
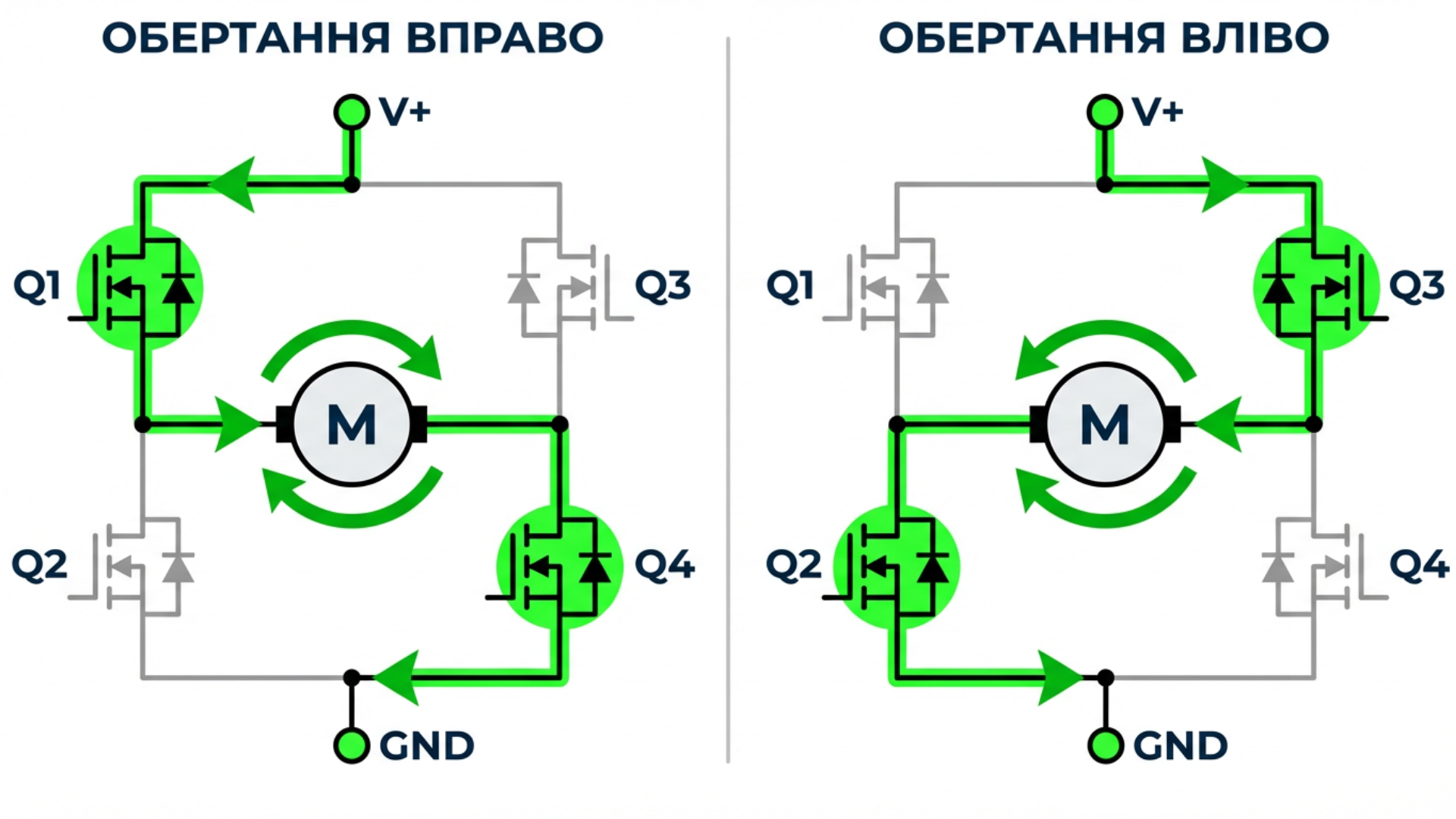
Принцип работы H-Bridge: различные комбинации переключателей меняют направление тока через мотор
Н-мост состоит из четырех переключателей (транзисторов), расположенных в форме буквы "Н". Мотор находится посередине. Включая разные пары переключателей, мы направляем ток в разных направлениях через мотор.
Популярные H-Bridge драйверы:
- L298N — классика для Arduino, два канала, до 2А на канал
- TB6612FNG — более компактный, эффективный, до 1.2А
- DRV8833 — популярный выбор для малых роботов
Практика: управление мотором с L298N
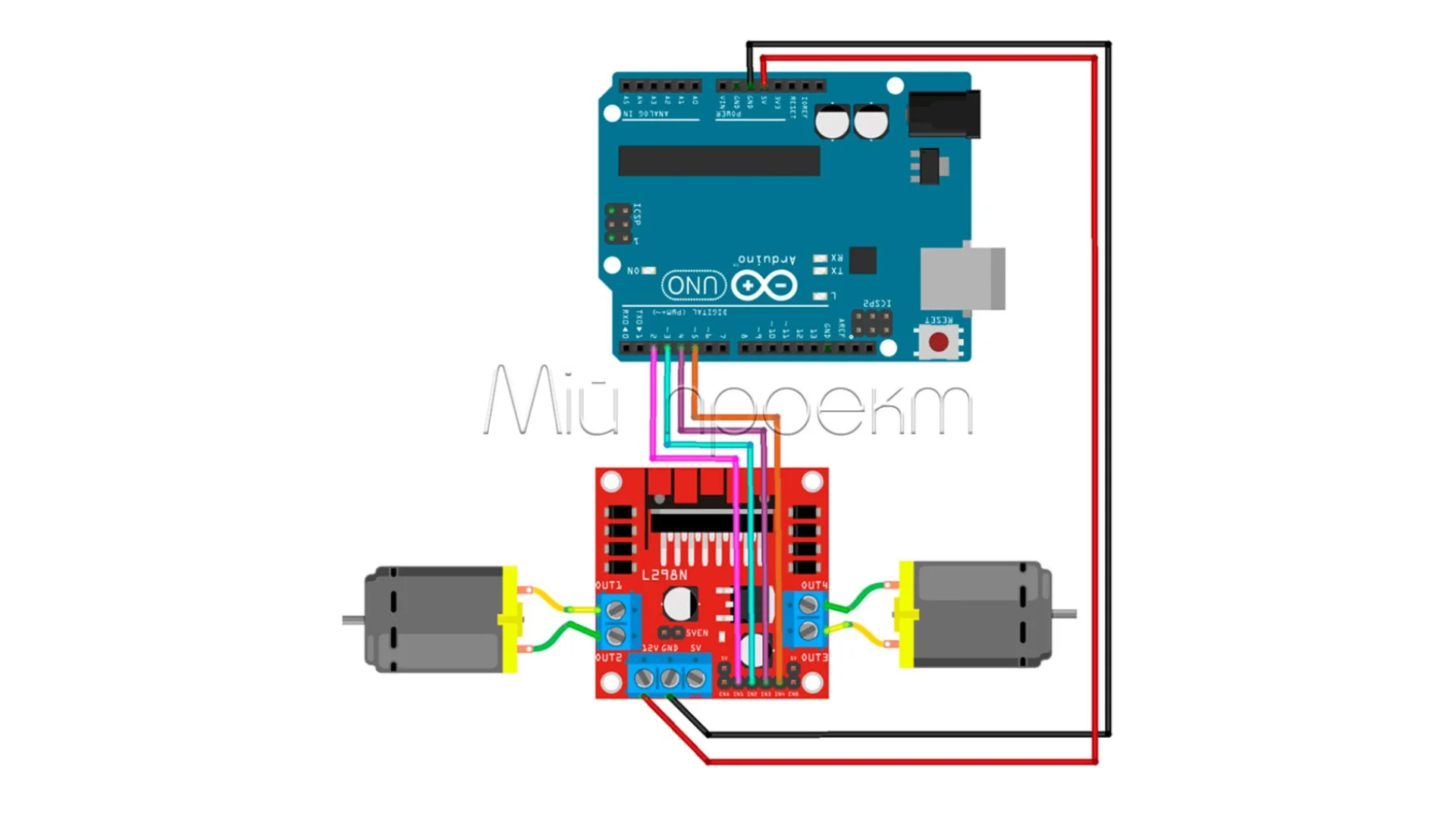
Схема подключения L298N к Arduino: ENA (PWM), IN1/IN2 (направление), мотор и питание
// Управление DC-мотором через L298N const int ENA = 9; // PWM для скорости const int IN1 = 7; // Направление 1 const int IN2 = 6; // Направление 2 void setup() { pinMode(ENA, OUTPUT); pinMode(IN1, OUTPUT); pinMode(IN2, OUTPUT); } // Вращение вперед с заданной скоростью (0-255) void forward(int speed) { digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW); analogWrite(ENA, speed); } // Вращение назад void backward(int speed) { digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH); analogWrite(ENA, speed); } // Остановка void stopMotor() { digitalWrite(IN1, LOW); digitalWrite(IN2, LOW); analogWrite(ENA, 0); } void loop() { forward(200); // 78% скорости вперед delay(2000); backward(150); // 59% скорости назад delay(2000); stopMotor(); delay(1000); }
Dead-time: защита от короткого замыкания
При быстром переключении Н-моста существует опасность shoot-through — короткого замыкания, когда оба транзистора одного плеча случайно включаются одновременно. Это может сжечь схему за миллисекунды!
Dead-time (мертвое время) — короткая пауза между выключением одного транзистора и включением другого. Качественные драйверы моторов имеют встроенный dead-time, но при самостоятельном построении Н-моста это критически важно учесть.
Сервоприводы: точное позиционирование
Как работает сервомотор?
Сервопривод — это не просто мотор, а целый механизм с обратной связью. Внутри находится DC-мотор, редуктор и потенциометр, который отслеживает текущий угол поворота. Встроенная электроника сравнивает желаемое положение (заданное через PWM) с фактическим и корректирует позицию.

Внутреннее устройство сервопривода: мотор, редуктор, потенциометр обратной связи, управляющая плата
Ключевая особенность: в отличие от обычного PWM, где важен duty cycle, для сервоприводов критична именно длительность импульса, а не его процент от периода!
Стандартные параметры сигнала
Типичный хобби-сервопривод (SG90, MG996R и т. п.) ожидает сигнал со следующими параметрами:
- Частота: 50 Гц (период 20 мс)
- Импульс 1 мс — положение 0°
- Импульс 1.5 мс — центральное положение 90°
- Импульс 2 мс — положение 180°
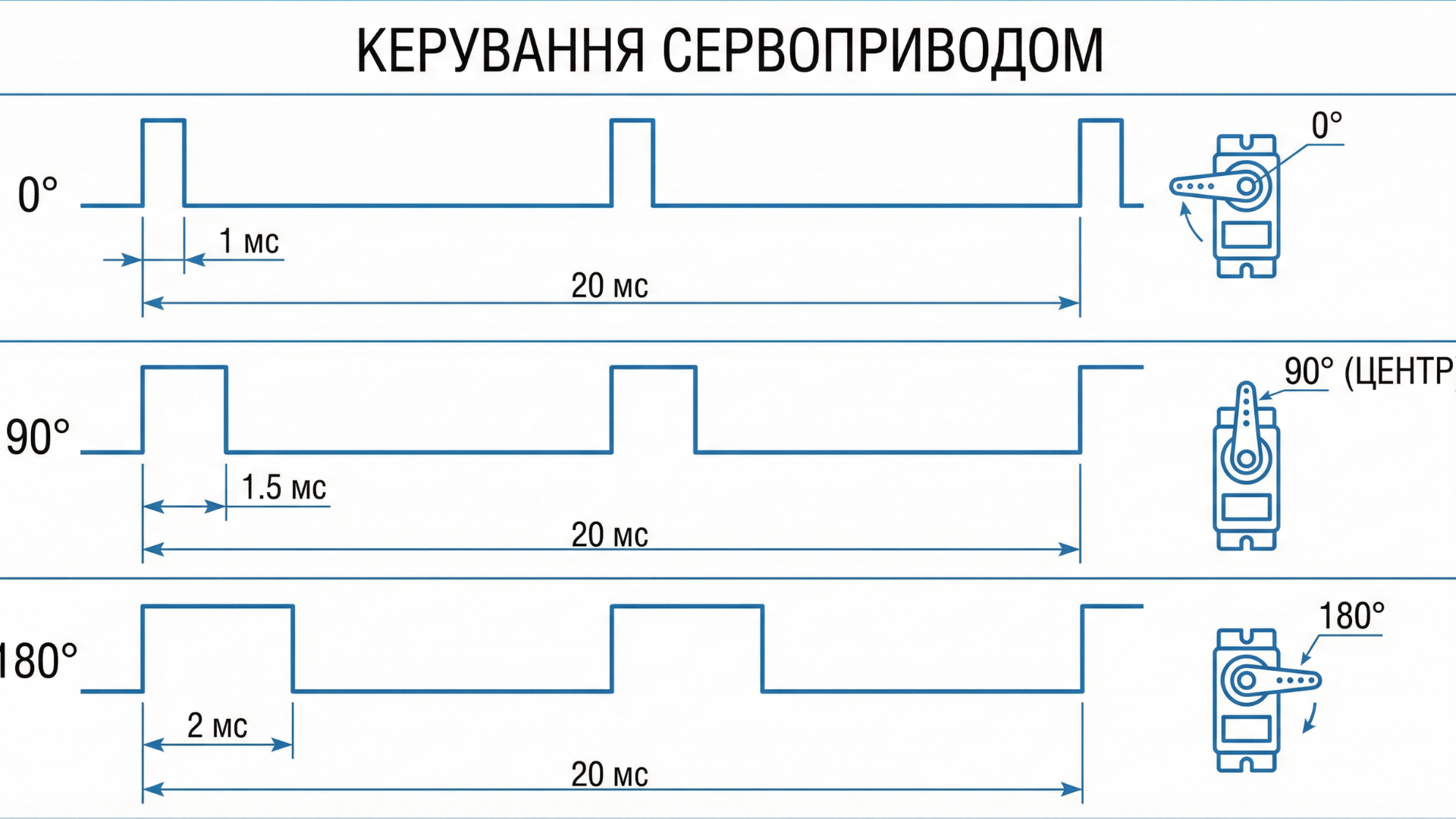
Зависимость угла сервопривода от ширины импульса: 1 мс = 0°, 1.5 мс = 90°, 2 мс = 180°
Частота 50 Гц (период 20 мс) для сервоприводов происходит со времен радиоуправляемых моделей 1960-х годов. Тогда сигнал передавался через PPM (Pulse Position Modulation), и период ~22.5 мс позволял управлять несколькими сервоприводами по одному радиоканалу. Стандарт сохранился, хотя технологии давно изменились!
Практика: управление сервоприводом
Arduino имеет встроенную библиотеку Servo, которая упрощает работу:
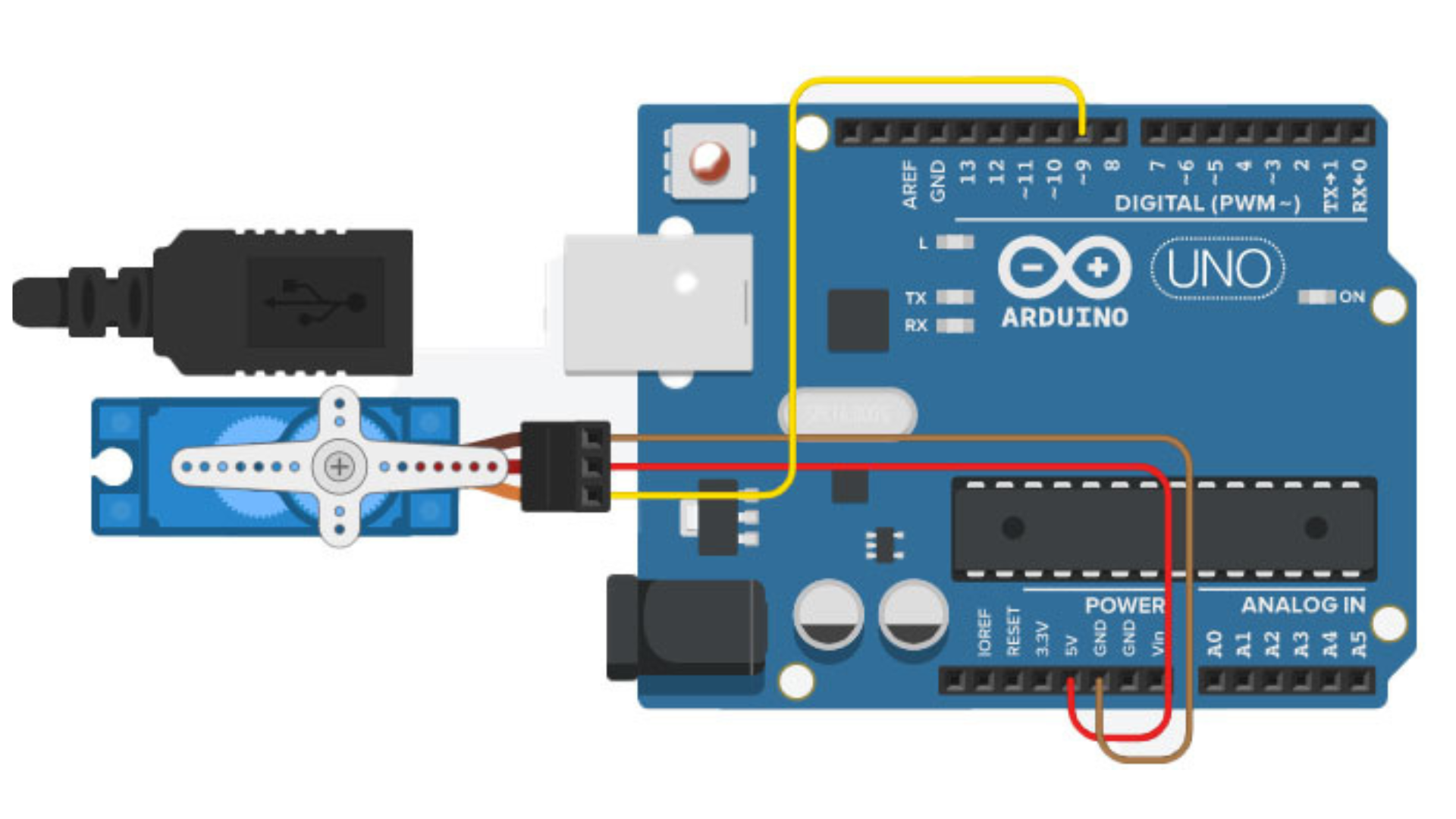
Схема подключения сервопривода: сигнал (оранжевый), питание (красный), земля (коричневый)
#include <Servo.h> Servo myServo; const int servoPin = 9; void setup() { myServo.attach(servoPin); } void loop() { // Поворачиваем на 0° myServo.write(0); delay(1000); // Центральное положение myServo.write(90); delay(1000); // Максимальный угол myServo.write(180); delay(1000); } // Альтернатива: точное управление через микросекунды // myServo.writeMicroseconds(1500); // Центр
Совет: Дешевые сервоприводы часто имеют неточные границы движения. Вместо стандартных 1000-2000 мкс они могут работать в диапазоне 500-2400 мкс. Экспериментируйте с writeMicroseconds() для точной калибровки.
PWM на Arduino: углубление в детали
Какие пины поддерживают PWM?
Не все пины Arduino одинаковы! PWM доступен только на пинах, обозначенных символом "~" на плате. Для Arduino Uno это пины 3, 5, 6, 9, 10, 11.

Расположение PWM-пинов на Arduino Uno — обозначены символом "~"
| Пины | Таймер | Частота по умолчанию |
|---|---|---|
| 5, 6 | Timer0 | ~980 Гц |
| 9, 10 | Timer1 | ~490 Гц |
| 3, 11 | Timer2 | ~490 Гц |
Как изменить частоту PWM?
По умолчанию Arduino использует частоты около 500 Гц. Но для некоторых применений (SMPS, бесшумное управление моторами) требуются более высокие частоты. Это можно настроить через регистры таймеров:
// Изменение частоты PWM на пинах 9 и 10 (Timer1) // ВНИМАНИЕ: это влияет на функцию delay() и millis()! void setup() { // Устанавливаем делитель = 1 для частоты ~31 кГц TCCR1B = TCCR1B & B11111000 | B00000001; // Делитель = 8 для частоты ~3.9 кГц // TCCR1B = TCCR1B & B11111000 | B00000010; // Делитель = 64 для частоты ~490 Гц (по умолчанию) // TCCR1B = TCCR1B & B11111000 | B00000011; pinMode(9, OUTPUT); } void loop() { analogWrite(9, 128); // 50% duty cycle }
Изменение настроек Timer0 (пины 5, 6) нарушит работу функций delay(), millis() и micros(). Избегайте модификации Timer0, если это возможно.
ESP32: больше возможностей
ESP32 имеет значительно более гибкую систему PWM. Вместо фиксированных таймеров, здесь есть 16 независимых PWM-каналов с программируемой частотой от 1 Гц до 40 МГц и разрешением до 16 бит!

ESP32 DevKit — все GPIO-пины поддерживают PWM с гибкой настройкой частоты
// PWM на ESP32 const int ledPin = 2; const int pwmChannel = 0; const int frequency = 5000; // 5 кГц const int resolution = 8; // 8 бит (0-255) void setup() { ledcSetup(pwmChannel, frequency, resolution); ledcAttachPin(ledPin, pwmChannel); } void loop() { // Плавное затухание for (int duty = 0; duty <= 255; duty++) { ledcWrite(pwmChannel, duty); delay(10); } }
Применение PWM в реальном мире
PWM окружает нас повсюду, даже если мы этого не замечаем:

PWM в повседневной жизни: освещение, транспорт, аудио, бытовая техника
- LED-освещение — от настольных ламп до автомобильных фар
- Экраны смартфонов и мониторов — регулировка яркости подсветки
- Электротранспорт — контроллеры моторов в Tesla, электросамокатах, дронах
- Class-D аудиоусилители — компактные и эффективные (до 95% КПД!)
- Импульсные блоки питания — в каждом компьютере и зарядном устройстве
- Солнечные инверторы — преобразование DC в AC для сети
- Терморегуляторы — управление элементами Пельтье
- Вентиляторы ПК — 4-pin PWM для бесшумного охлаждения
Марсоход Perseverance использует PWM-контроллеры для управления своими моторами и сервоприводами. В разреженной атмосфере Марса эффективное управление мощностью критически важно — каждый ватт на счету!
Идеи для проектов
Вот несколько идей для практики работы с PWM:
🟢 Начальный уровень
Смешивание цветов через три PWM-канала. Создайте радугу или цветомузыку!
Яркость LED реагирует на звук через микрофон — простой аудиовизуализатор.
Классический регулятор яркости — первый шаг к пониманию PWM.
🟡 Средний уровень
Два DC-мотора через H-Bridge, управление со смартфона по Bluetooth.
Два сервопривода для поворота камеры по горизонтали и вертикали.
Скорость зависит от температуры — умное охлаждение.
🔴 Продвинутый уровень
Синхронное PWM-управление четырьмя бесколлекторными моторами через ESC.
Оптимизация заряда аккумулятора через отслеживание точки максимальной мощности.
Собственный аудиоусилитель с ШИМ — вершина мастерства!
Выводы
PWM — это тот редкий случай, когда простая идея имеет огромное влияние. Быстрое переключение между двумя состояниями позволяет цифровым устройствам управлять аналоговым миром: от яркости одного светодиода до движения электромобиля.
Ключевые моменты, которые стоит запомнить:
- Duty cycle определяет среднюю мощность (0-100%)
- Частота должна быть достаточно высокой (>1 кГц для LED, >20 кГц для бесшумных моторов)
- Сервоприводы работают на 50 Гц и зависят от ширины импульса (1-2 мс)
- analogWrite() на Arduino — самый простой способ начать

От простого к сложному: PWM — фундамент современной электроники
Теперь, когда вы понимаете принципы PWM, весь мир микроконтроллеров открывается перед вами. От простого мигания LED до создания собственного дрона — все это построено на тех же фундаментальных принципах, которые вы только что изучили.
Успехов в ваших проектах! 🚀
Полезные ссылки
© 2025 Мій Проект. Автор: Jazzzman. Использование материалов разрешено только с ссылкой на источник.

 3А")









Написать комментарий