Подключение сервопривода SG90 к Arduino
Содержание
1. Введение
Современная робототехника и автоматизация не обходятся без использования сервоприводов — электромеханических устройств, которые позволяют точно контролировать угловое положение, скорость и ускорение. Среди доступных и популярных моделей выделяется сервопривод SG90. Этот миниатюрный и экономичный прибор часто используется в образовательных проектах, прототипировании и любительских разработках.
В этой статье мы детально рассмотрим, как подключить сервопривод SG90 к платформе Arduino, которая стала стандартом для многих энтузиастов электроники. Мы также исследуем принципы работы сервоприводов, их программирование и возможности расширения функциональности.
2. Обзор сервопривода SG90
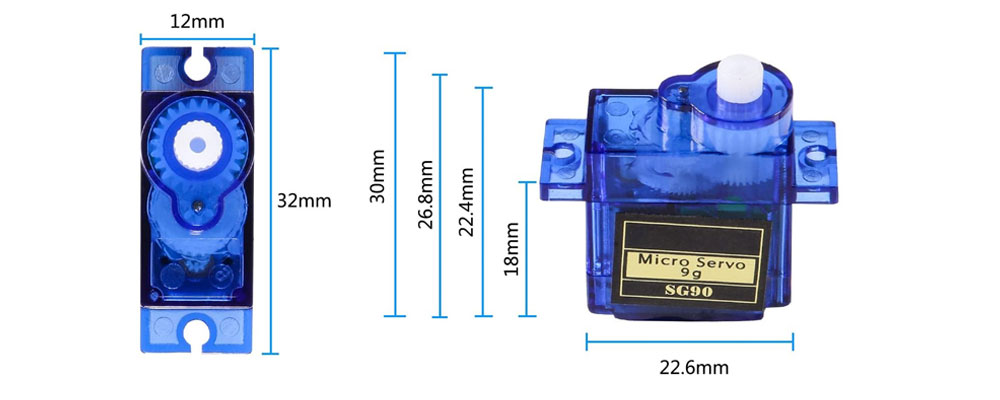
Технические характеристики
| Параметр | Значение |
|---|---|
| Рабочее напряжение | 4.8V ~ 6V |
| Максимальный угол поворота | 180 градусов |
| Скорость | 0.1 с/60° при 4.8V |
| Момент | 1.8 кг·см при 4.8V |
| Размеры | 22.2 × 11.8 × 31 мм |
| Вес | ~9 г |
Принцип работы
Сервопривод SG90 является позиционным сервоприводом, который использует сигнал PWM (широтно-импульсная модуляция) для определения угла поворота. Встроенный потенциометр позволяет контроллеру определять текущий угол и корректировать его в соответствии с входным сигналом.
3. Необходимые материалы и оборудование
- Arduino UNO или другая совместимая плата (Nano, Mega и т.д.).
- Сервопривод SG90.
- Макетная плата для удобства подключения.
- Соединительные провода (папа-папа или папа-мама в зависимости от потребности).
- Внешний источник питания (если планируется использование нескольких сервоприводов или других энергоемких компонентов).
- USB-кабель для подключения Arduino к компьютеру.
4. Подключение SG90 к Arduino
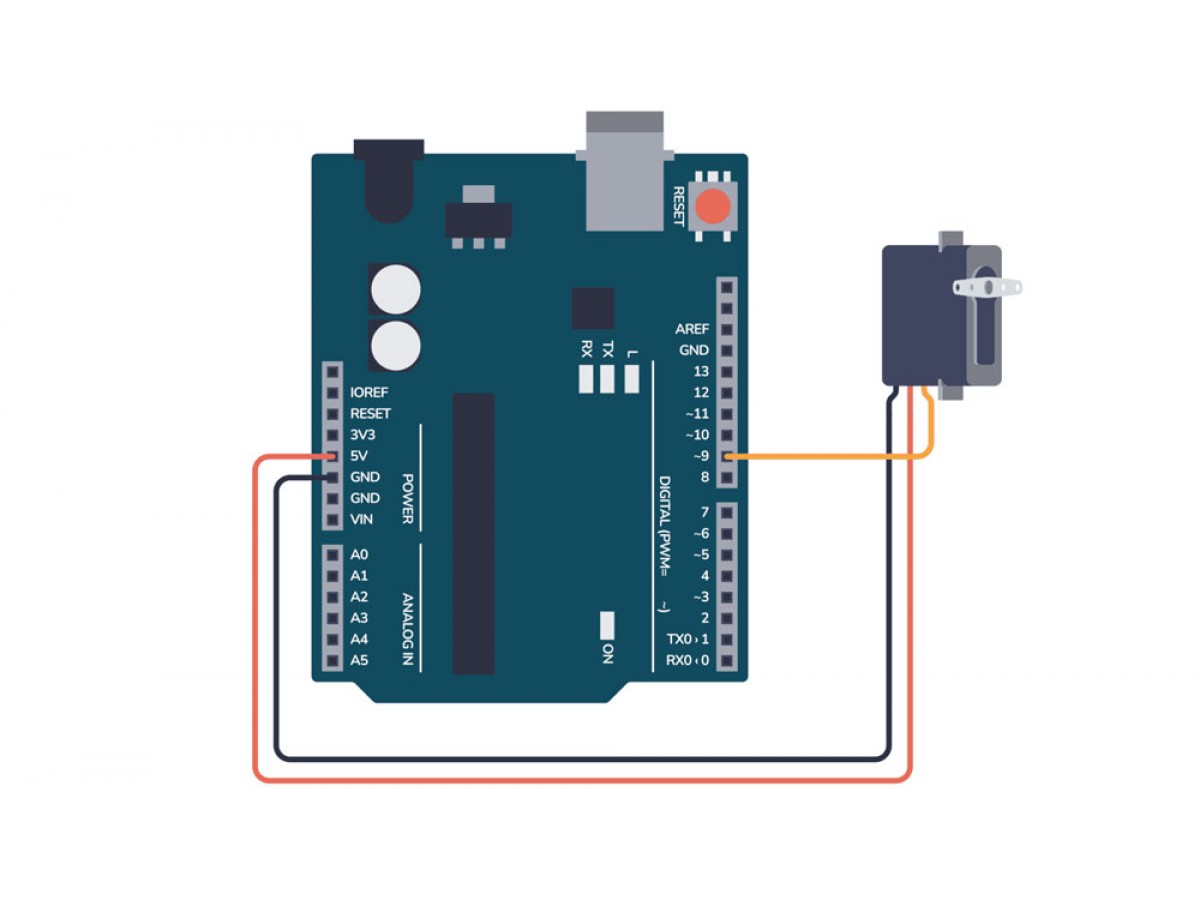
Схема подключения
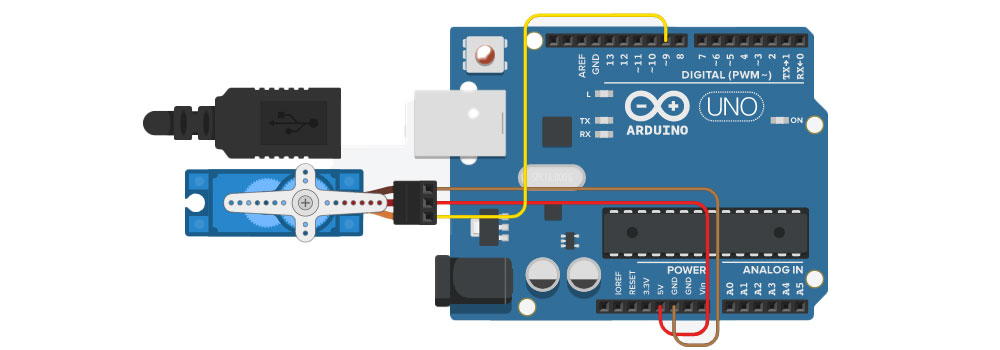
Подключение проводов:
- Коричневый провод (GND) → Подключите к GND на Arduino.
- Красный провод (+V) → Подключите к 5V на Arduino.
- Оранжевый провод (Signal) → Подключите к цифровому выходу D9 на Arduino.
Замечания по питанию
- Емкость питания: Arduino может обеспечить ограниченный ток на выходе 5V. Если сервопривод подвергается нагрузке или используется несколько сервоприводов, рекомендуется использовать внешний источник питания (например, батарею или блок питания 5V).
- Общее заземление: В случае использования внешнего источника питания необходимо соединить GND внешнего источника с GND Arduino для обеспечения общего заземления.
5. Программирование Arduino для управления SG90
Использование библиотеки Servo.h
Arduino IDE содержит встроенную библиотеку Servo.h, которая упрощает управление сервоприводами.
Преимущества использования Servo.h:
- Простота в использовании.
- Поддержка до 12 сервоприводов на Arduino UNO и до 48 на Arduino Mega.
- Автоматическое управление сигналами PWM.
Пример кода
#include <Servo.h>
Servo myServo; // Создание объекта класса Servo
void setup() {
myServo.attach(9); // Подключение сервопривода к выходу D9
}
void loop() {
// Поворот сервопривода от 0° до 180°
for (int pos = 0; pos <= 180; pos += 1) {
myServo.write(pos);
delay(15); // Задержка для плавности движения
}
// Поворот сервопривода от 180° до 0°
for (int pos = 180; pos >= 0; pos -= 1) {
myServo.write(pos);
delay(15);
}
}
Объяснение кода
- Импорт библиотеки:
#include <Servo.h>добавляет возможность использовать функции для управления сервоприводом. - Создание объекта:
Servo myServo;создает экземпляр сервопривода. - Инициализация: В функции
setup()мы подключаем сервопривод к определенному пину (myServo.attach(9);). - Основной цикл: В
loop()сервопривод сначала поворачивается от 0° до 180°, а затем обратно. - Плавность движения: Задержка
delay(15);обеспечивает плавный переход между позициями.
6. Тестирование и отладка
- Загрузка скетча: Подключите Arduino к компьютеру и загрузите код через Arduino IDE.
- Наблюдение: Сервопривод должен плавно поворачиваться вперед и назад.
- Проверка подключения: Если сервопривод не движется, проверьте правильность соединений.
- Проверка питания: Убедитесь, что сервопривод получает достаточное напряжение.
Возможные проблемы и их решение
- Сервопривод дрожит или движется рывками:
- Причина: Недостаточное или нестабильное питание.
- Решение: Используйте внешний источник питания с достаточным током.
- Сервопривод не реагирует:
- Причина: Неправильное подключение сигнала или GND.
- Решение: Проверьте все соединения и общее заземление.
- Перегрев сервопривода:
- Причина: Перегрузка или блокировка движения.
- Решение: Обеспечьте свободное движение и избегайте длительного удержания в крайних положениях.
7. Расширенные возможности и проекты
Управление несколькими сервоприводами
Arduino позволяет управлять несколькими сервоприводами одновременно.
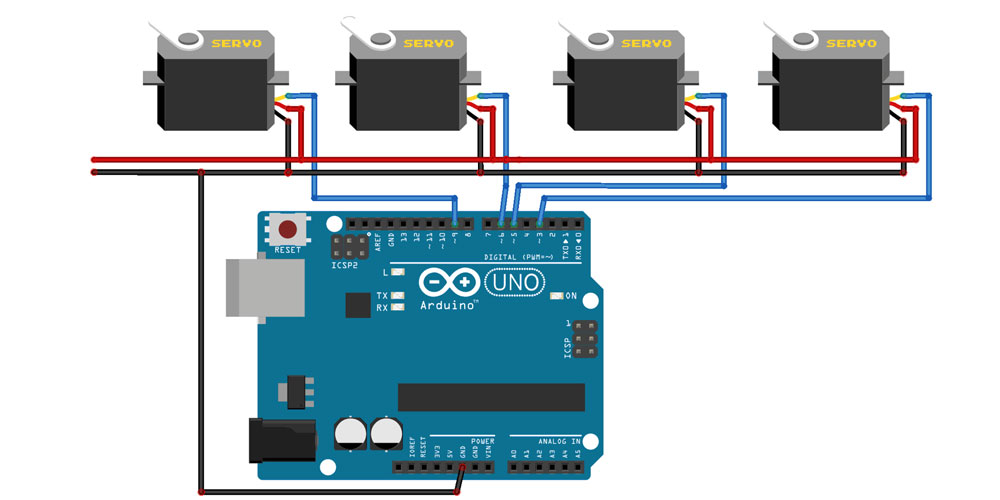
Пример:
#include <Servo.h>
Servo servo1;
Servo servo2;
void setup() {
servo1.attach(9);
servo2.attach(6);
}
void loop() {
servo1.write(90);
servo2.write(45);
delay(1000);
}
Интеграция с датчиками
Добавление датчиков позволяет создавать интерактивные системы.
Пример проекта: Сервопривод, управляемый датчиком расстояния. В этом проекте мы будем использовать датчик расстояния HC-SR04, чтобы изменять угол сервопривода в зависимости от измеренного расстояния.
Пример кода с датчиком расстояния
#include <Servo.h>
#include <NewPing.h>
#define TRIGGER_PIN 12 // Пин для триггера
#define ECHO_PIN 11 // Пин для эхо
#define MAX_DISTANCE 200 // Максимальное расстояние в см
Servo myServo; // Создаем объект для управления сервоприводом
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // Инициализация ультразвукового датчика
void setup() {
myServo.attach(9); // Подключаем сервопривод к пину 9
}
void loop() {
int distance = sonar.ping_cm(); // Измеряем расстояние
if (distance > 0) {
int angle = map(distance, 0, 200, 0, 180); // Масштабируем расстояние до угла сервопривода
myServo.write(angle); // Поворачиваем сервопривод
}
delay(100); // Небольшая задержка между измерениями
}
8. Интересные факты о сервоприводах и Arduino
- Широкое применение: Сервоприводы используются не только в робототехнике, но и в моделях самолетов, автомобилях, механизмах автоматических дверей и системах видеонаблюдения.
- Простота управления: Сервоприводы просты в использовании благодаря стандартным интерфейсам PWM, что делает их идеальными для обучения электронике и программированию.
- Точность: Они могут обеспечивать точное управление положением, что делает их полезными для манипуляторов и других механизмов, требующих точности.
9. Заключение
Подключение сервопривода SG90 к Arduino является отличным начальным проектом для тех, кто интересуется робототехникой и электроникой. Используя библиотеку Servo.h, можно легко создавать программы для управления сервоприводом и добавлять дополнительные элементы, такие как датчики или несколько сервоприводов для расширенных проектов. Надеемся, эта статья помогла вам понять принципы работы и настройки сервоприводов с Arduino.
© 2024 Мій Проект. Автор материала Jazzzman. Использование материалов разрешено только с указанием источника.



")

Написать комментарий