Что такое MPU6050?
MPU6050 - это интегрированная микросхема, которая включает в себя:
- 3-осевой MEMS гироскоп
- 3-осевой MEMS акселерометр
- Цифровой процессор движения (DMP)
- 16-битный АЦП для каждого канала
Этот сенсор может измерять угловую скорость и ускорение с высокой точностью. Диапазоны измерения можно настроить:
- Гироскоп: ±250, ±500, ±1000, ±2000 °/с
- Акселерометр: ±2g, ±4g, ±8g, ±16g
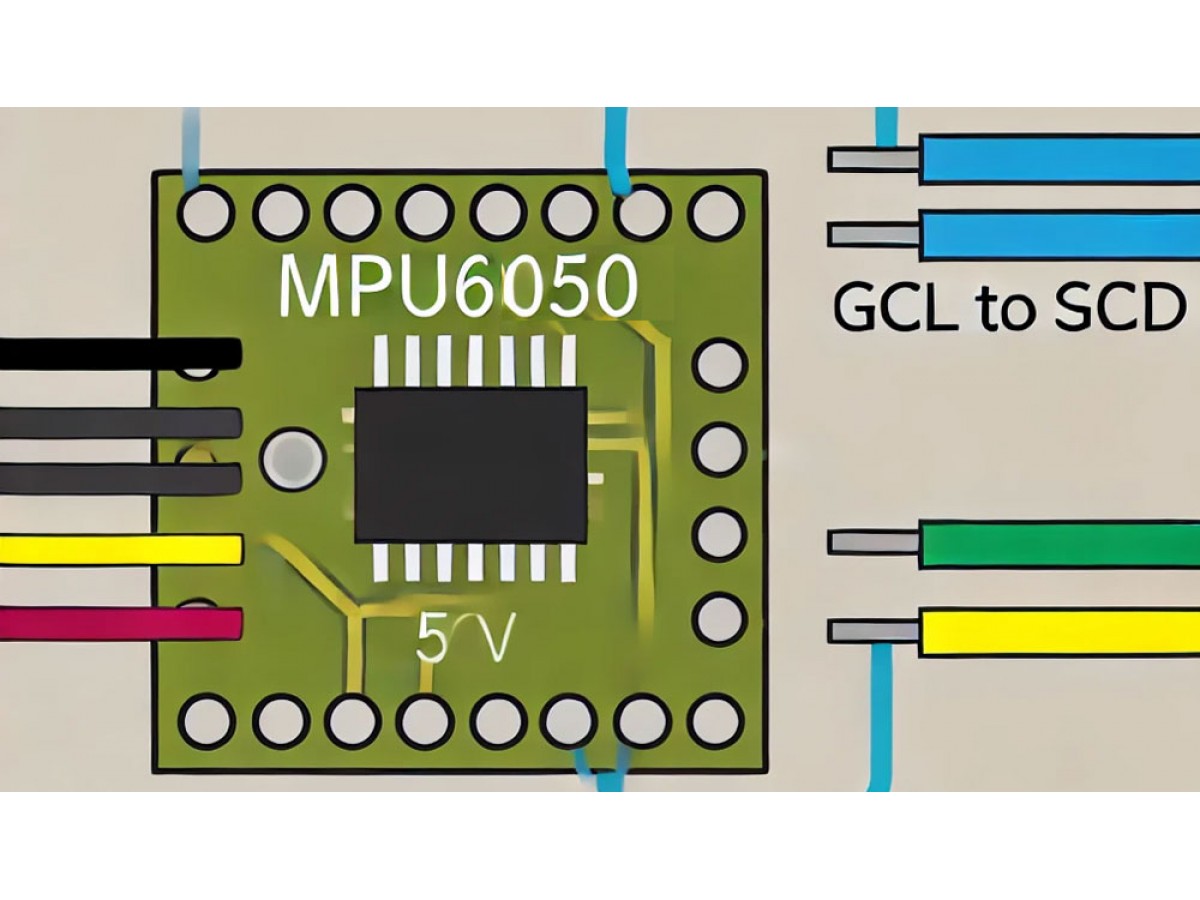
Подключение MPU6050 к Arduino
Для подключения MPU6050 к Arduino используется интерфейс I2C. Вот схема подключения:
- 1 VCC → 5V на Arduino
- 2 GND → GND на Arduino
- 3 SCL → A5 на Arduino (SCL пин)
- 4 SDA → A4 на Arduino (SDA пин)
Другие пины (XDA, XCL, ADO, INT) можно оставить неподключенными для базового использования.
Программирование Arduino для работы с MPU6050
Для работы с MPU6050 мы будем использовать библиотеку I2Cdev и MPU6050. Вот базовый код для получения данных с сенсора:
// Подключаем библиотеки для работы с I2C и MPU-6050
#include <Wire.h>
#include <MPU6050.h>
MPU6050 accelgyro; // Создаем объект класса MPU6050
int16_t ax, ay, az; // Переменные для акселерометра
int16_t gx, gy, gz; // Переменные для гироскопа
void setup() {
Wire.begin(); // Инициализируем I2C
Serial.begin(38400); // Инициализируем сериальную коммуникацию
accelgyro.initialize(); // Инициализируем MPU-6050
Serial.println(accelgyro.testConnection() ? "MPU6050 connection successful" : "MPU6050 connection failed"); // Проверка соединения
}
void loop() {
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); // Получение данных с сенсора
Serial.print("a/g:\t");
Serial.print(ax); Serial.print("\t");
Serial.print(ay); Serial.print("\t");
Serial.print(az); Serial.print("\t");
Serial.print(gx); Serial.print("\t");
Serial.print(gy); Serial.print("\t");
Serial.println(gz);
delay(50); // Задержка для удобства чтения данных
}
Анализ результатов
После загрузки скетча на Arduino и подключения MPU6050, мы получаем поток данных через сериальный порт. Вот пример вывода данных:
a/g: -16276 1144 3536 -138 906 -21 a/g: -16100 1060 3800 -197 560 47 a/g: -16080 1204 3648 -187 415 -13
Каждая строка данных имеет формат:
a/g: AX AY AZ GX GY GZ
где:
- AX, AY, AZ: данные акселерометра по осям X, Y, Z соответственно
- GX, GY, GZ: данные гироскопа по осям X, Y, Z соответственно
Интерпретация данных
Полученные данные представлены в "сыром" формате. Для преобразования их в понятные единицы измерения:
- Акселерометр: разделите на 16384 для получения значений в g (при диапазоне ±2g)
- Гироскоп: разделите на 131 для получения значений в °/с (при диапазоне ±250°/с)
Анализируя эти данные, можно сделать выводы о движении и ориентации сенсора:
- Изменения в данных акселерометра указывают на линейное ускорение или изменение ориентации относительно гравитации.
- Изменения в данных гироскопа показывают вращательное движение вокруг соответствующих осей.
Расширенные возможности и практическое применение
MPU6050 имеет много дополнительных функций:
- 1 DMP (Digital Motion Processor): позволяет выполнять сложные вычисления непосредственно на чипе.
- 2 Температурный сенсор: можно получать данные о температуре.
- 3 Низкопотребляющие режимы: для экономии энергии в мобильных проектах.
- 4 Прерывания: можно настроить сенсор для генерации прерываний при определенных событиях движения.
Применение MPU6050
MPU6050 можно использовать в различных проектах:
- 1 Стабилизация дронов и роботов: обеспечение стабильного полета и движения.
- 2 Системы навигации: отслеживание движения и ориентации.
- 3 Фитнес-трекеры: измерение активности и движения.
- 4 Игровые контроллеры: управление движением в играх.
- 5 Системы стабилизации камер: предотвращение дрожания и обеспечение стабильных изображений.
Советы по использованию MPU6050
Несколько советов для эффективного использования MPU6050:
- 1 Калибровка: Для точных измерений важно провести калибровку сенсора.
- 2 Фильтрация: Используйте фильтры (например, комплементарный или фильтр Калмана) для улучшения данных.
- 3 Частота опроса: Экспериментируйте с частотой опроса для оптимального баланса между точностью и производительностью.
- 4 Ориентация: Обратите внимание на ориентацию сенсора при монтаже.
Вывод
MPU6050 - это мощный инструмент для измерения движения, который легко интегрируется с Arduino. Понимание его возможностей и правильное использование открывает широкие перспективы для создания инновационных проектов в области робототехники и интерактивных систем. Экспериментируйте, совершенствуйте свои навыки и создавайте увлекательные проекты с MPU6050 и Arduino!





-192x200.jpg "Плата Разработчика Nano V3.0 AtMega328P Type-C")

Написать комментарий