Что такое ультразвук?
Ультразвук — это высокочастотные звуковые волны, частота которых превышает верхнюю границу слышимого диапазона человеческого слуха (более 20 000 Гц). Человеческое ухо способно воспринимать звуки в диапазоне приблизительно от 20 Гц до 20 000 Гц. Ультразвуковые волны широко используются в различных областях, включая медицинскую диагностику, очистку, а также в электронике для измерения расстояний.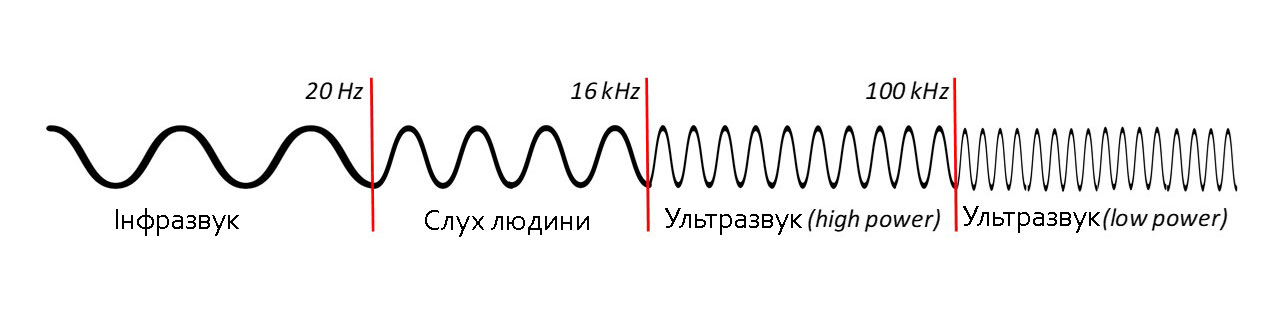
Обзор аппаратной части датчика HC-SR04
Ультразвуковой датчик расстояния HC-SR04 состоит из двух основных компонентов:
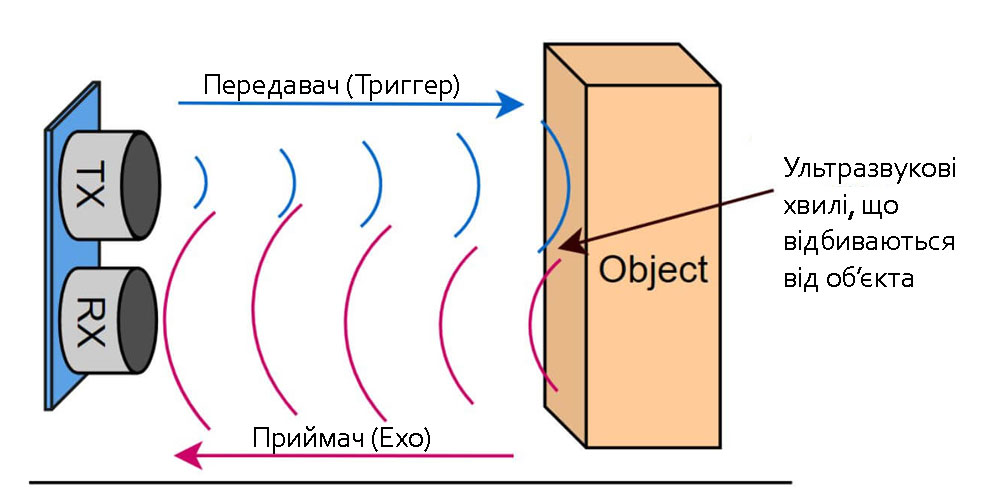
- Передатчик (Триггер): Преобразует электрические сигналы в ультразвуковые импульсы частотой 40 кГц.
- Приемник (Эхо): Улавливает отраженные ультразвуковые волны и преобразует их обратно в электрические сигналы.
Технические характеристики HC-SR04
- Рабочее напряжение: 5 В постоянного тока (DC 5V)
- Рабочий ток: 15 мА
- Рабочая частота: 40 кГц
- Максимальная дистанция: 4 метра
- Минимальная дистанция: 2 см
- Точность измерений: 3 мм
- Угол измерения: 15 градусов
- Входной сигнал триггера: 10 микросекундный TTL импульс
- Размеры: 45 x 20 x 15 мм
Подключение HC-SR04 к Arduino
Расположение выводов датчика HC-SR04
Прежде чем подключать датчик к Arduino, ознакомьтесь с расположением его выводов:
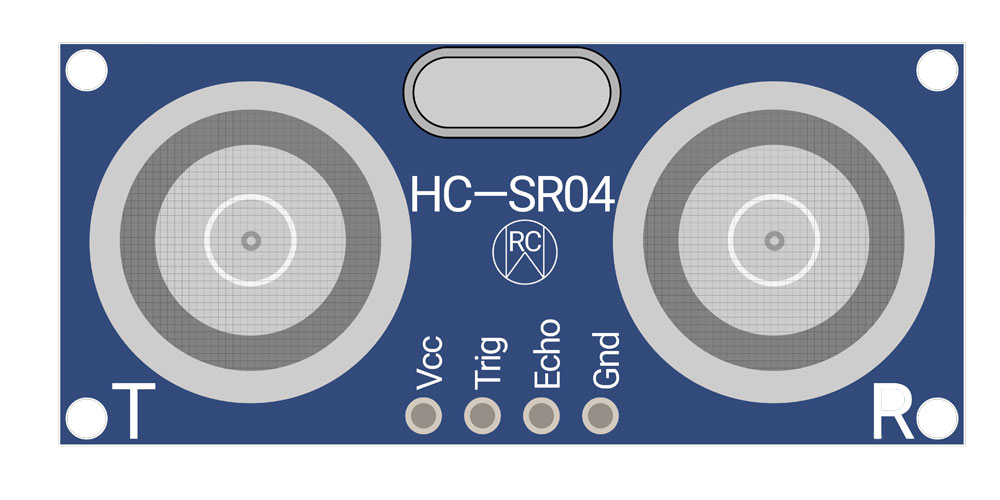
- VCC: Подключается к питанию 5 В на Arduino.
- Trig: Используется для запуска ультразвукового импульса. Во время высокого уровня сигнала (10 микросекунд) датчик испускает серию ультразвуковых волн.
- Echo: Вывод, который сигнализирует о получении отраженных ультразвуковых волн. Ширина импульса пропорциональна расстоянию до объекта.
- GND: Заземление. Подключается к GND на Arduino.
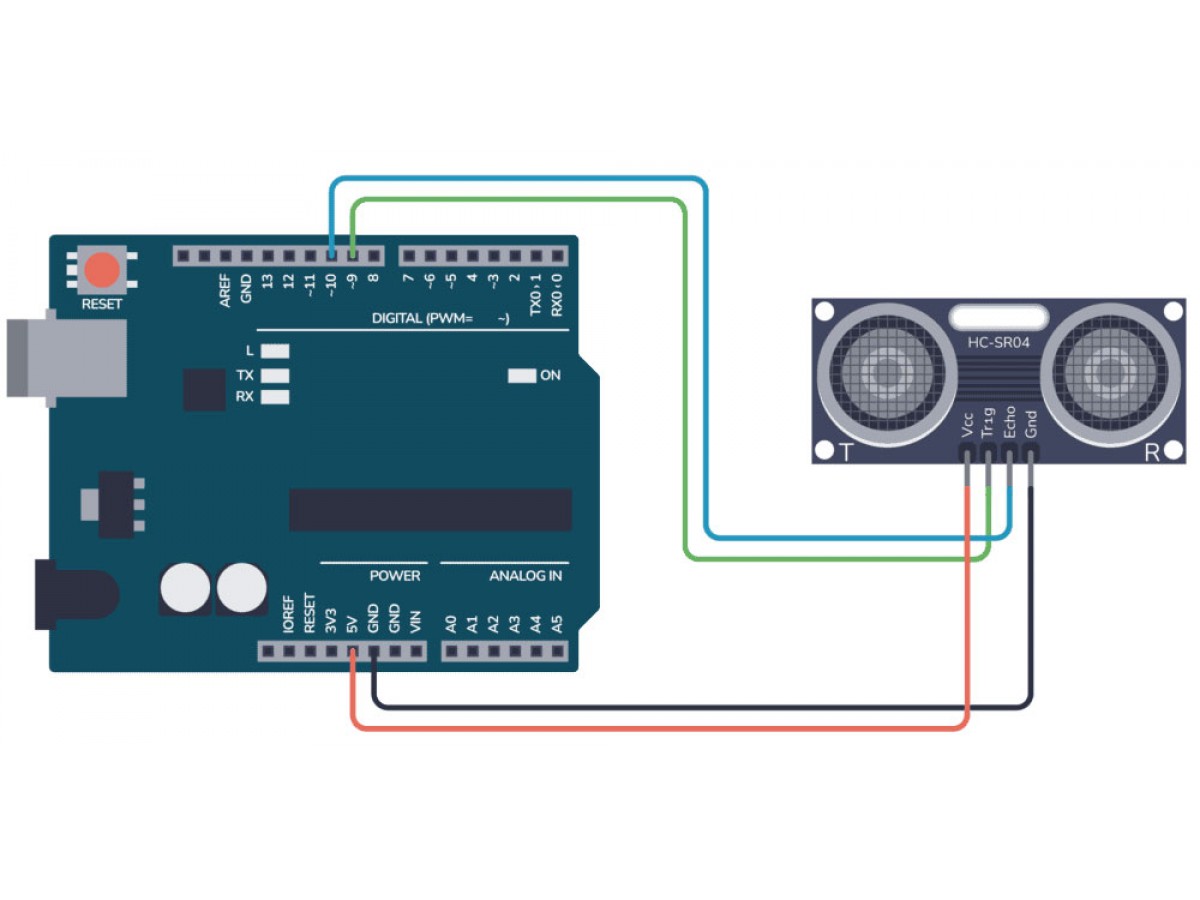
Схема подключения
Вот как правильно подключить HC-SR04 к Arduino:
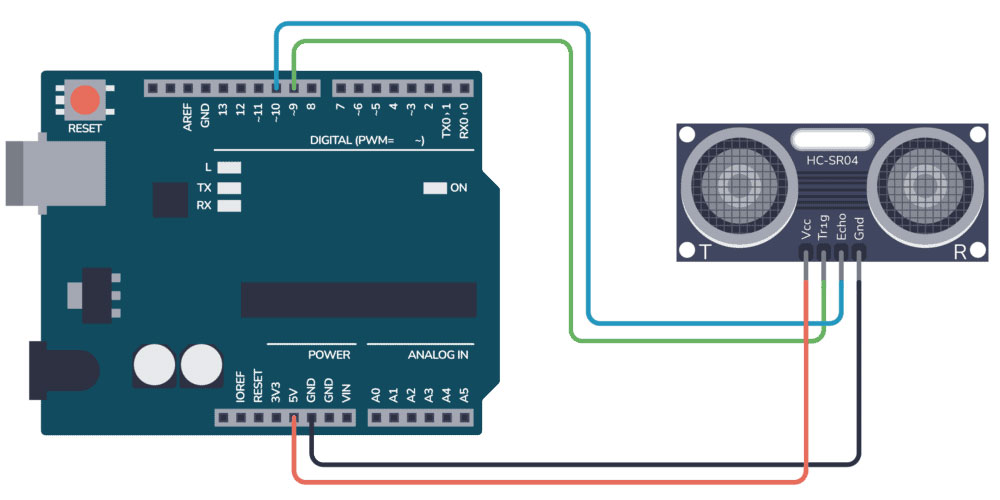
Схема подключения HC-SR04 к Arduino
- VCC подключите к 5V на Arduino.
- GND подключите к GND на Arduino.
- Trig подключите к цифровому выводу #9 на Arduino.
- Echo подключите к цифровому выводу #10 на Arduino.
Установка библиотеки NewPing
Для упрощения работы с ультразвуковым датчиком HC-SR04 мы будем использовать библиотеку NewPing. Она позволяет легко управлять несколькими датчиками одновременно и получать результаты в сантиметрах, дюймах или во времени.
Шаги для установки библиотеки NewPing
- Откройте Arduino IDE.
- Перейдите в меню Sketch > Include Libraries > Manage Libraries...
- В поле поиска введите "NewPing".
- Найдите библиотеку NewPing от Tim Eckel и нажмите Install.
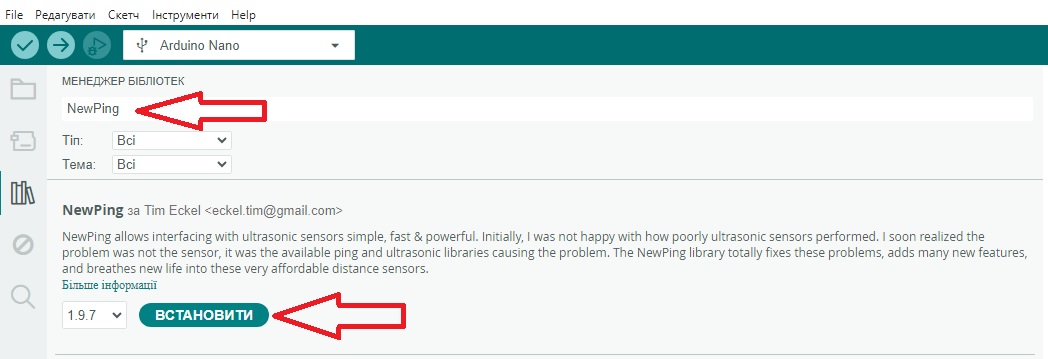
Установка библиотеки NewPing через менеджер библиотек Arduino IDE
Написание кода для HC-SR04
После подключения датчика и установки библиотеки NewPing можно переходить к написанию кода для Arduino. Ниже приведен простой пример, который отображает расстояние в сантиметрах на серийном мониторе.
Пример кода
// Подключение библиотеки NewPing
#include "NewPing.h"
// Подключение HC-SR04 к выводам Arduino: Trig к 9-му, Echo к 10-му
#define TRIGGER_PIN 9
#define ECHO_PIN 10
// Максимальная дистанция для пинга (в сантиметрах)
#define MAX_DISTANCE 400
// Настройка выводов и максимальной дистанции для NewPing
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
void setup() {
Serial.begin(9600); // Инициализация серийного соединения
}
void loop() {
Serial.print("Distance = ");
Serial.print(sonar.ping_cm()); // Измерение дистанции в сантиметрах
Serial.println(" cm");
delay(500); // Задержка 500 мс между измерениями
}
Загрузка и тестирование скетча
- Подключите Arduino к компьютеру с помощью USB-кабеля.
- Откройте Arduino IDE и вставьте приведенный выше код.
- Выберите правильную плату и порт в меню Tools.
- Загрузите скетч на Arduino.
- Откройте Serial Monitor (Серийный монитор) в Arduino IDE и установите скорость передачи данных на 9600 bps.
- Направьте датчик на различные объекты и наблюдайте за отображением измеряемых расстояний.
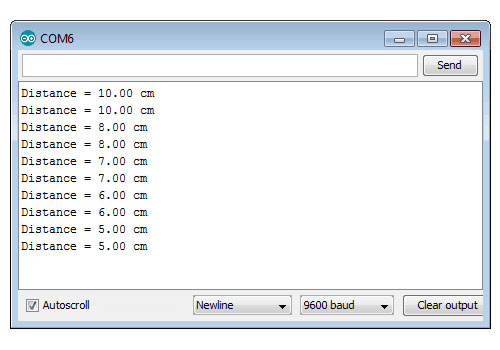
Отображение измеренного расстояния в серийном мониторе
Пояснение кода
Давайте детально рассмотрим, как работает приведенный выше код:
- Подключение библиотеки NewPing:
#include "NewPing.h"Этот рядок подключает библиотеку NewPing, которая упрощает работу с ультразвуковым датчиком HC-SR04. - Определение выводов Trig и Echo:
#define TRIGGER_PIN 9 #define ECHO_PIN 10 #define MAX_DISTANCE 400Здесь мы определяем, к каким выводам Arduino подключены Trig и Echo. Также определяем максимальную дистанцию для измерений (400 см). - Создание объекта sonar:
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);Создаем экземпляр класса NewPing, который будет использоваться для измерения расстояний. - Функция setup():
void setup() { Serial.begin(9600); }Инициализируем серийное соединение на скорости 9600 бит/с для отображения результатов на компьютере. - Функция loop():
void loop() { Serial.print("Distance = "); Serial.print(sonar.ping_cm()); Serial.println(" cm"); delay(500); }В бесконечном цикле измеряем расстояние с помощью функцииping_cm()и выводим результат в серийном мониторе каждые 500 миллисекунд.
Другие полезные функции библиотеки NewPing
Библиотека NewPing предлагает несколько полезных функций для расширения возможностей вашего проекта:
Измерение в дюймах
Если вы хотите получать результаты в дюймах вместо сантиметров, используйте функцию ping_in():
Serial.print(sonar.ping_in());
Serial.println(" in");
Получение результатов с десятичными дробями
Для более точных измерений можно использовать режим длительности вместо режима расстояний:
Serial.print((sonar.ping() / 2) * 0.0343);
Serial.println(" cm");
Использование метода ping_median()
Метод ping_median(iterations) позволяет повысить точность измерений путем проведения нескольких измерений и усреднения результатов:
int iterations = 5;
Serial.print((sonar.ping_median(iterations) / 2) * 0.0343);
Serial.println(" cm");
Этот метод выполняет пять измерений (по умолчанию) и усредняет их, что позволяет уменьшить влияние случайных ошибок и шумов.
Заключение
Ультразвуковой датчик HC-SR04 является мощным и доступным инструментом для измерения расстояний в ваших проектах с Arduino. Благодаря низкому энергопотреблению, доступной цене и простоте подключения, он идеально подходит для различных применений, от робототехники до систем безопасности.
Используя библиотеку NewPing, вы можете легко интегрировать этот датчик в свои проекты, получая точные и надежные результаты измерений. Экспериментируйте с различными настройками и функциями библиотеки, чтобы максимально использовать возможности HC-SR04 в ваших творческих и технических идеях.
Надеемся, что это руководство было полезным для вас! Если у вас есть вопросы или вы хотите поделиться своими проектами, оставляйте комментарии ниже.
#Arduino #HC-SR04 #Ультразвук #Электроника #DIY #Проекты #НовыйНачало #Сенсоры #Робототехника #NewPing
© 2024 Мій Проект. Автор материала Jazzzman Все права защищены. Использование материалов разрешено только с ссылкой на источник.


Написать комментарий